Configurando um PhotoRobot Workspace
O seguinte manual do usuário descreve os passos para configurar um Workspace no PhotoRobot Controls App (doravante apenas “CAPP”). Um workspace é uma lista de hardware que será usado para uma sessão de fotos específica. Pode incluir vários módulos PhotoRobot, câmeras, luzes e outros acessórios.
Nota: Se ainda não instalou e se familiarizou com o CAPP, consulte PhotoRobot Primeiros Passos para uma visão geral do software, da sua configuração e da sua utilização. As informações neste manual do utilizador visam apoiar os clientes que já possuem um conhecimento geral do software.
Além disso, para fins de demonstração, note que é possível trabalhar com um Espaço de Trabalho de Exemplo predefinido, que está configurado para usar hardware virtual. Um espaço de trabalho de exemplo permite aos utilizadores experimentar várias funcionalidades no CAPP selecionando robôs e câmaras virtuais.
Para criar um espaço de trabalho, vá para Workspaces em CAPP e, em seguida, toque no botão criar (+).
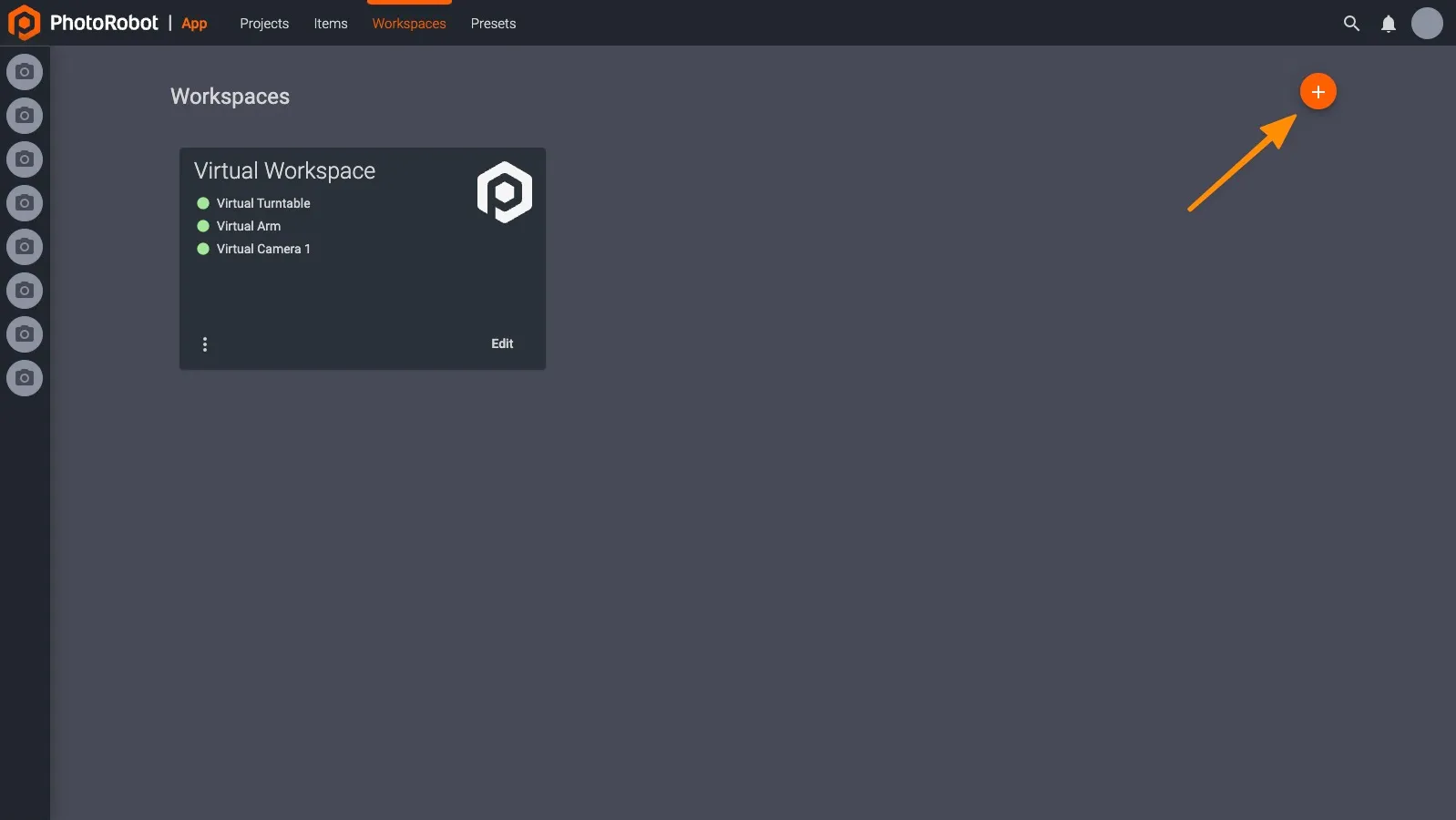
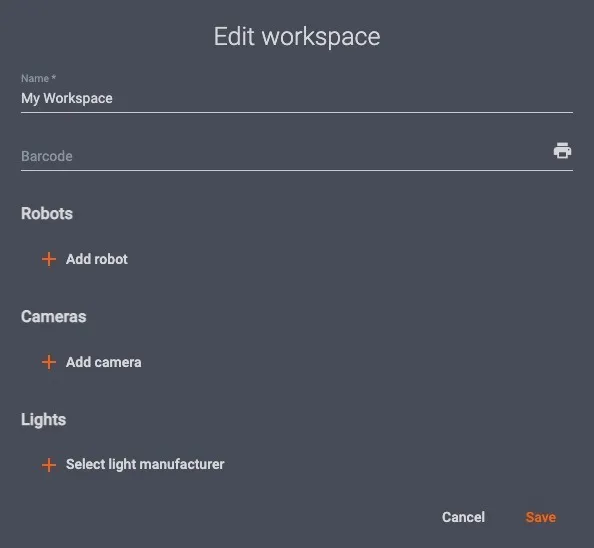
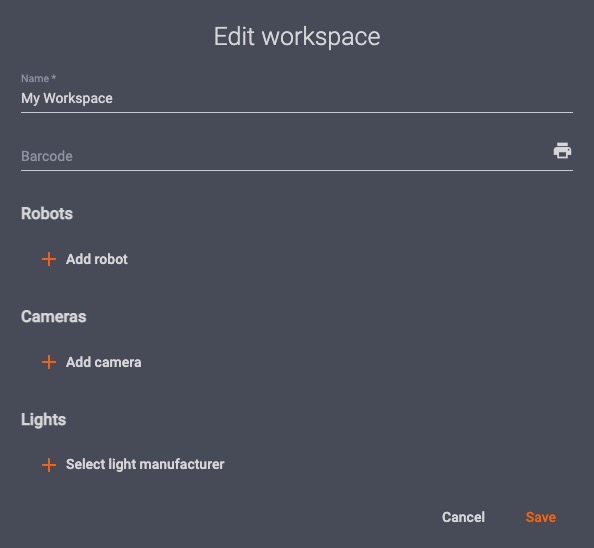
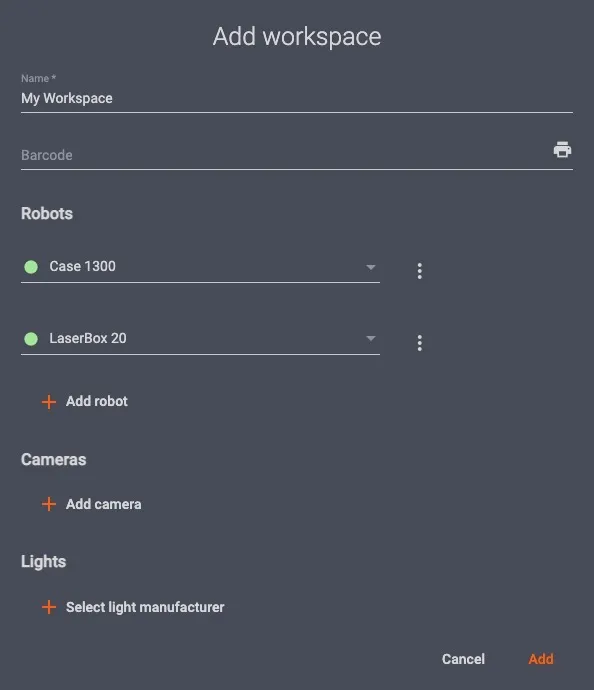
Ao pressionar o botão criar, será aberto o menu Editar espaço de trabalho, onde é possível Adicionar robô, Adicionar câmera e Selecionar fabricante de luz.
Esteja ciente de que, após conectar um hardware (ou câmera) a um espaço de trabalho, você pode ver imediatamente se ele está online (reconhecido pelo CAPP). Para fazer isso, verifique a cor do ponto à esquerda do nome do equipamento em questão. Se o dispositivo for reconhecido, haverá um ponto verde.

Alternativamente, um ponto cinza indica que o hardware não foi reconhecido ou não está ligado. Se houver um ponto vermelho, há um erro, como o usuário não ter mudado a câmera para o modo manual. Para identificar a causa do erro, passe o mouse sobre o ponto vermelho para exibir uma dica de ferramenta com uma descrição do erro que está ocorrendo.
Para problemas comuns e suas soluções, consulte o Manual de Solução de Problemas da PhotoRobot.
Adicionar robô
No próximo passo, certifique-se de que todos os robôs para a sessão fotográfica estejam ligados e conectados à mesma rede local que o seu computador. Em seguida , pressione Adicionar robô.
- Pressione Adicionar robô para ver uma lista de robôs disponíveis.
- Selecione os robôs que você usará na lista.
Configurar Fast-Shot
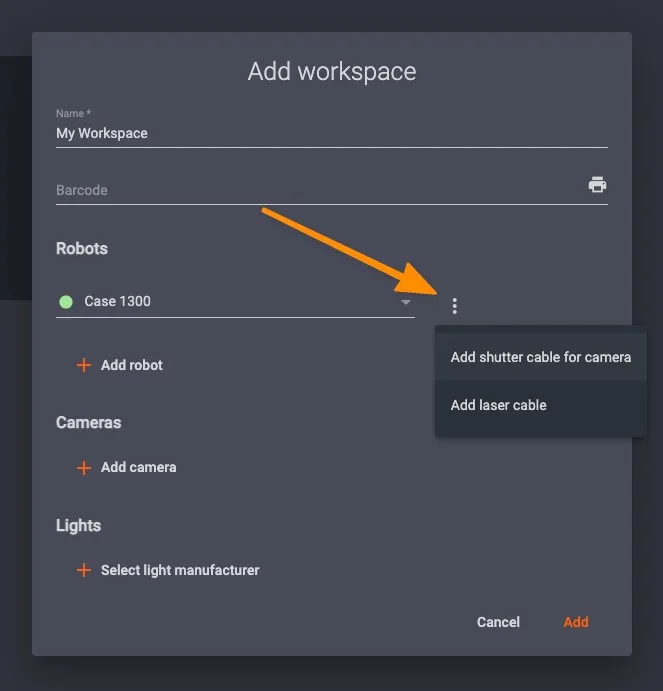
Para ativar o modo de tiro rápido, conecte qualquer robô com uma câmera através de um cabo obturador.
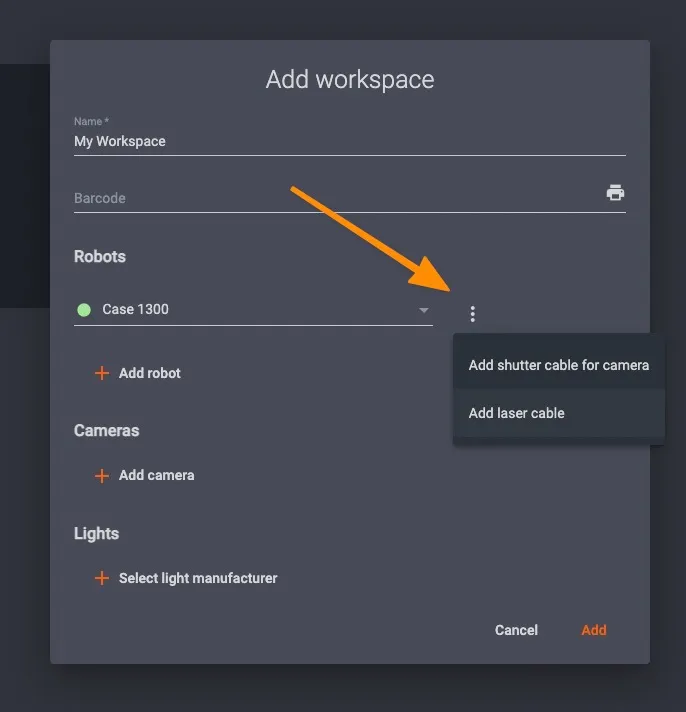
- Clique nos Três pontos verticais à direita do robô para abrir o menu da câmera.
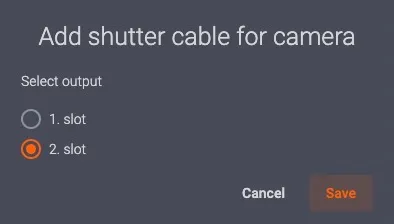
- Selecione Adicionar cabo do obturador para a câmera.
- Escolha o slot de saída (1 ou 2). Selecione qual slot de saída com base na fiação física do cabo do obturador. Para cabos de PhotoRobot, use o slot 2.
( ! ) - Para outros fabricantes, pode ser necessário usar o slot 1.
Configurar lasers
Dependendo do hardware em uso, existem várias opções para configurar lasers:
Para Lasers Embutidos
Tanto a Caixa 850 quanto a 1300 têm sistemas laser projetados no robô com configuração zero necessária.
LaserBox de 20 Portas
O LaserBox de 20 portas é um dispositivo autônomo que permite o controle de vários lasers via conexão de rede. Para configurar o LaserBox, certifique-se primeiro de que ele esteja ativado e, em seguida, adicione-o como outro robô ao espaço de trabalho:
LaserBox de 4 portas
Se você tiver um LaserBox de 4 portas conectado ao seu robô, selecione Adicionar cabo laser nos itens do menu de 3 pontes à direita do ID do robô:
Adicionar câmeras
Para adicionar uma câmera, primeiro certifique-se de que o dispositivo esteja ligado e conectado via USB ao computador. Se você não estiver usando um robô com capacidade de giro (por exemplo, o braço robótico ou o quadro), também precisará definir o ângulo no qual a câmera direcionará a mesa.
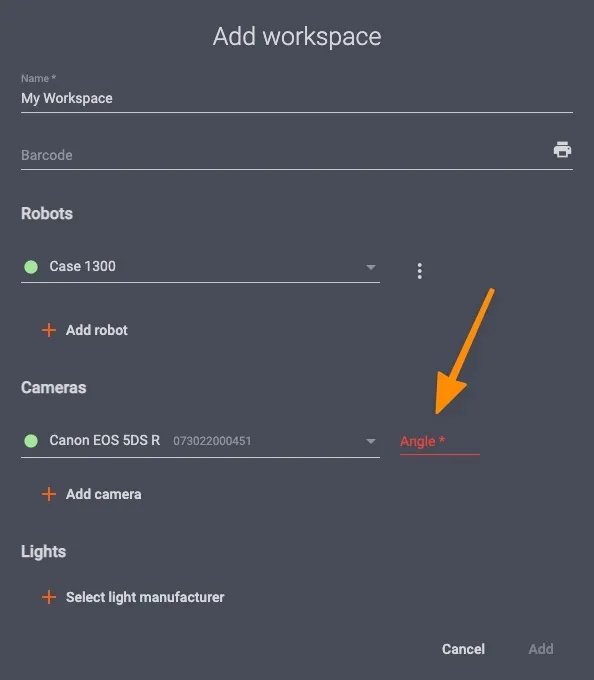
( ! ) - Definir o ângulo para robôs sem capacidade de giro é necessário para que certos recursos, como o autocentramento, funcionem.
( * ) - Veja a lista completa de câmeras compatíveis com PhotoRobot.
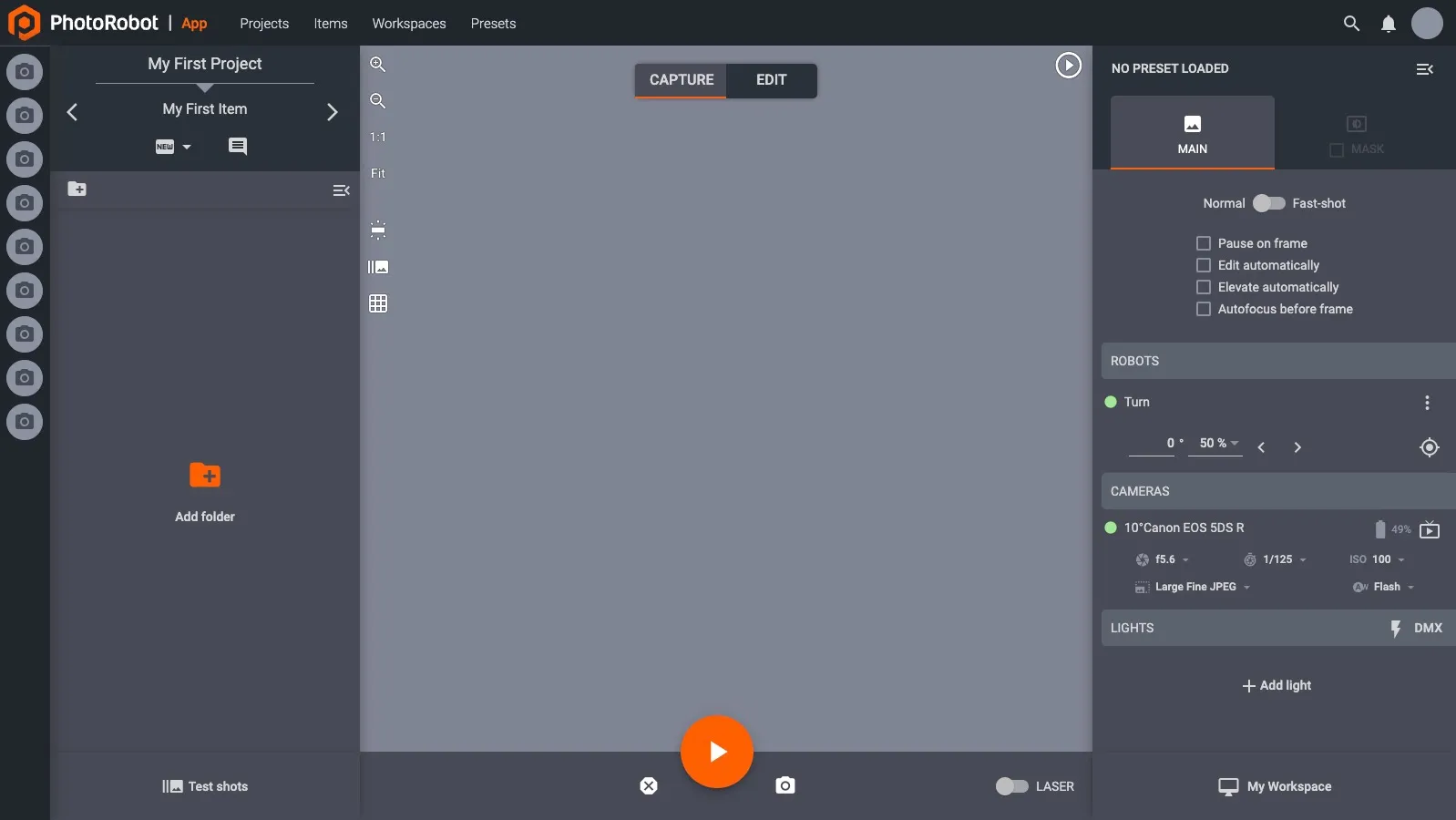
Configurar luzes
Os sistemas de luz compatíveis com o PhotoRobot incluem dois tipos de luzes: luzes estroboscópicas da FOMEI e Broncolor, ou quaisquer luzes LED com suporte DMX. Para configurar uma configuração de iluminação no menu do espaço de trabalho, vá para Luzes e adicione luzes compatíveis em Selecionar fabricante de luz.
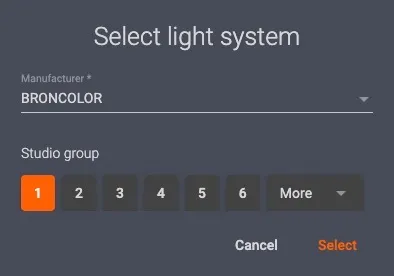
Luzes Estroboscópicas - Broncolor
Para configurar as luzes Broncolor, selecione primeiro BRONCOLOR e escolha entre o grupo de luzes studio que você deseja controlar:
Luzes Estroboscópicas - FOMEI
Para luzes da FOMEI, os usuários têm duas opções de controle:
FOMEI LAN Transceiver (método preferido)
Para controlar as luzes via FOMEI LAN Transceiver, certifique-se primeiro de que ele está on-line e conectado à sua rede.
Em seguida, selecione LAN. Depois, abaixo de LAN no menu suspenso, selecione Fomei LAN Transceiver.

FOMEI Dongle USB (Legado)
Também é possível controlar luzes com o dongle WiFi da FOMEI conectado diretamente ao seu computador via USB.
( ! ) Esteja ciente de que este método não é mais recomendado. Isso se deve ao fato de que requer drivers adicionais para serem instalados em seu computador. A FOMEI também não suporta mais sistemas MacOS mais recentes.
Luzes LED - DMX
Para controlar quaisquer luzes LED compatíveis com o protocolo DMX, conecte as luzes através de um rj45 ou cabo USB ao robô.
Em seguida, você pode selecionar O fabricante de luz DMX.
Mais tarde, você criará uma luz individual na tela Capture:
Para cada luz, você pode configurar dois canais:

- O canal Brightness permite o controle sobre o nível de brilho da luz selecionada.
- O canal Color é suportado por algumas luzes e permite o ajuste dos níveis de cor.


Série EOS Rebel


Série EOS DSLR


Série EOS M Mirrorless


Série PowerShot


Close-Up / Portátil

A série Canon EOS Rebel oferece câmeras DSLR amigáveis para iniciantes com qualidade de imagem sólida, controles intuitivos e recursos versáteis. Ideais para entusiastas da fotografia, essas câmeras oferecem foco automático confiável, telas sensíveis ao toque de ângulo variável e gravação de vídeo Full HD ou 4K.
Conexão
Resolução (MP)
Resolução
A série Canon EOS DSLR oferece imagens de alta qualidade, foco automático rápido e versatilidade, tornando-a ideal para fotografia e produção de vídeo.
Conexão
Resolução (MP)
Resolução
A série Canon EOS M Mirrorless combina design compacto com desempenho semelhante ao de uma DSLR. Com lentes intercambiáveis, foco automático rápido e sensores de imagem de alta qualidade, essas câmeras são ótimas para viajantes e criadores de conteúdo que buscam portabilidade sem sacrificar a qualidade da imagem.
Conexão
Resolução (MP)
Resolução
A série Canon PowerShot oferece câmeras compactas e fáceis de usar para fotógrafos casuais e entusiastas. Com modelos que variam de simples point-and-shoots a câmeras de zoom avançadas, eles oferecem conveniência, qualidade de imagem sólida e recursos como estabilização de imagem e vídeo 4K.
Conexão
Resolução (MP)
Resolução
As câmeras Canon Close-Up & Handheld são projetadas para fotografia e vídeo detalhados e próximos. Compactas e fáceis de usar, elas oferecem foco preciso, imagens de alta resolução e recursos macro versáteis, perfeitas para vlogs, fotografia de produtos e close-ups criativos.


