Começando - PhotoRobot suporte ao usuário
O Aplicativo PhotoRobot Controls (doravante referido como “CAPP”) foi projetado para automatizar processos de produção de conteúdo (imagens, vídeos, 360s e modelos 3D). Este guia consiste em 4 seções, cada uma representando o processo.
- CONFIGURAÇÃO - Crie um espaço de trabalho: câmeras, hardware e projetos
- CAPTURA - Controle PhotoRobot hardware e câmeras, capture imagens e vídeos
- EDIT - Conteúdo visual pós-processo
- PUBLICAÇÃO - Gerar imagens de saída em vários formatos, "gerenciar perfis"
Instalação de aplicativo de controles de PhotoRobot
Para instalar o aplicativo PhotoRobot Controls em seu computador, faça login na sua conta PhotoRobot e vá para PhotoRobot Downloads.
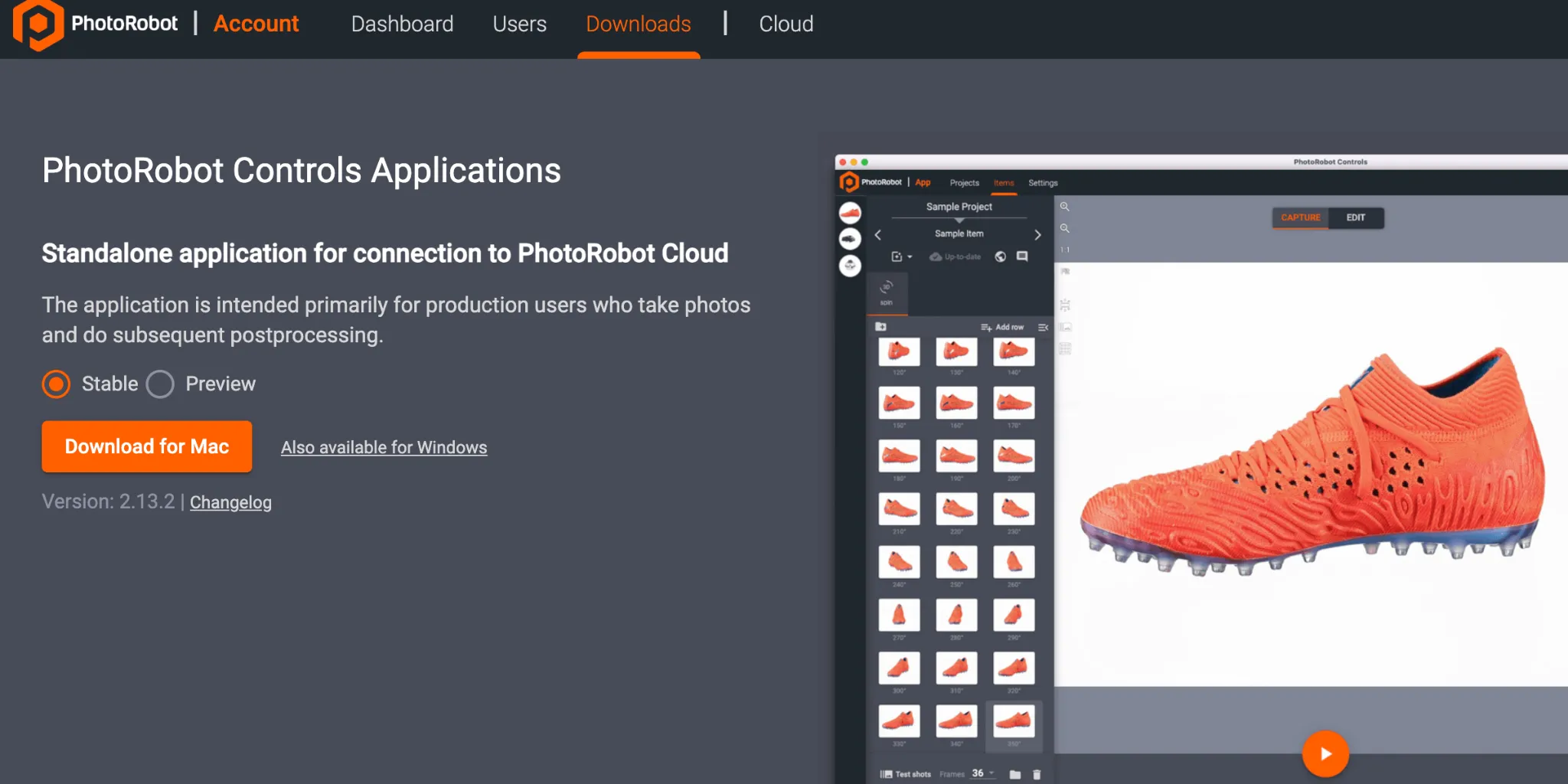
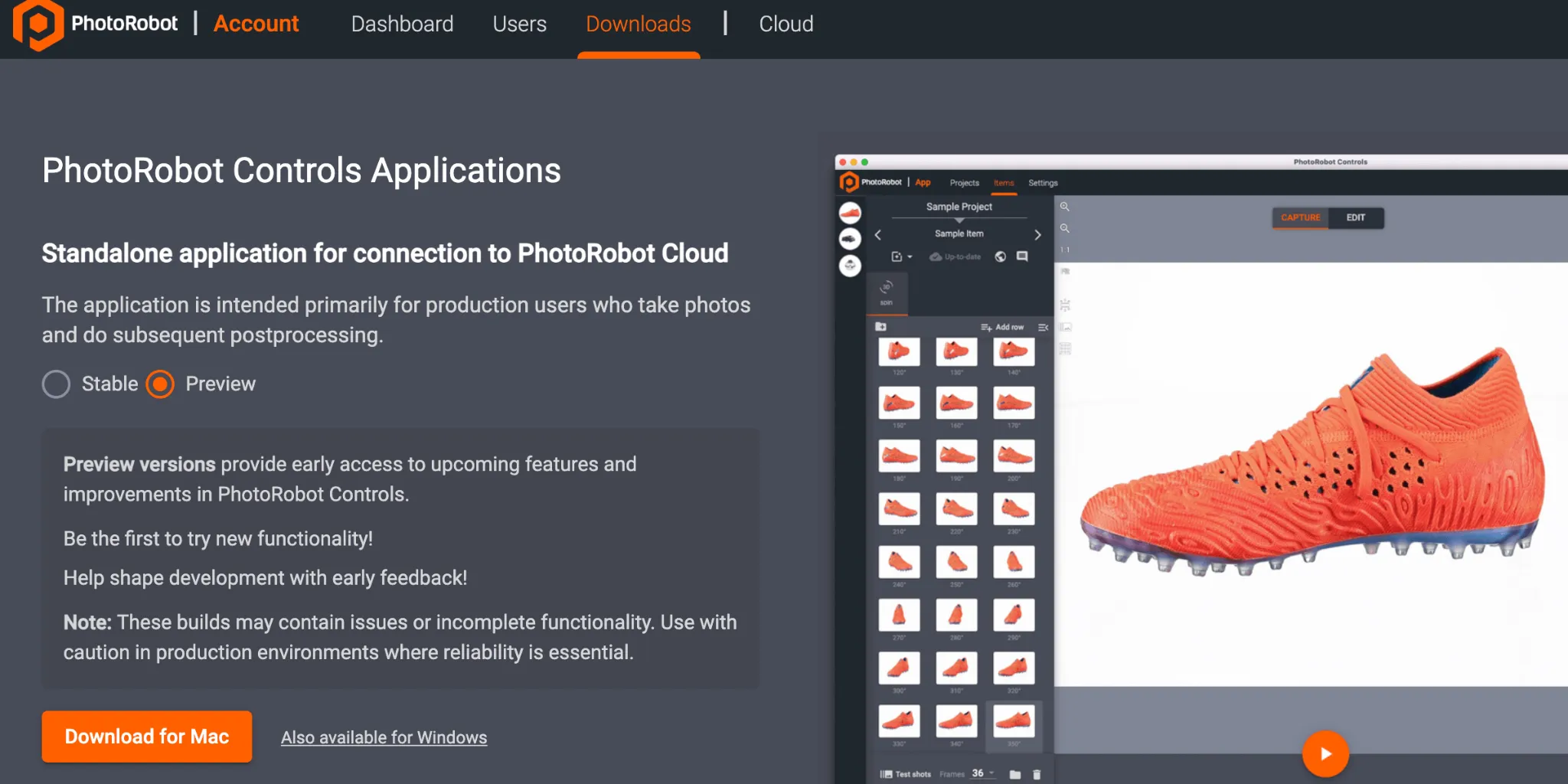
Nota: Tanto a versão estável quanto a versão prévia do CAPP estão disponíveis para download por meio do assistente do instalador. A versão estável contém a versão mais recente do CAPP e recebe versões frequentes. Enquanto isso, a versão prévia do CAPP fornece acesso antecipado aos recursos e correções mais recentes que são transferidos para a versão estável poucos dias após o desenvolvimento. Isso permite que os usuários testem quaisquer problemas que ocorram na versão de visualização antes de entrar em contato com o suporte, pois a maioria dos problemas relatados na versão estável já foram resolvidos na versão de visualização. No entanto, lembre-se de que a versão prévia não é recomendada para uso em produção, na qual a estabilidade é um fator crítico. A versão prévia está em desenvolvimento ativo, que ainda pode incluir recursos incompletos ou bugs não resolvidos.
Importante: As versões mais antigas do CAPP não se destinam à distribuição pública ou do cliente devido ao risco de corrupção do banco de dados. As versões mais antigas do CAPP são acessíveis apenas aos técnicos autorizados da PhotoRobot para desenvolvimento interno ou para casos de uso extremamente especiais.
Para encontrar a versão estável mais recente e a versão de pré-visualização do CAPP, consulte CAPP Latest Download Versions.
Suporte de auto-instalação e solução de problemas
O processo de instalação começa com o download do arquivo do instalador.
Observe os requisitos para instalação do CAPP:
- O usuário deve ter direitos de permissão de administrador no computador que instala o CAPP.
- O computador deve atender a todos os requisitos de sistema e hardware da PhotoRobot.
- O computador deve estar executando um sistema operacional compatível com as atualizações mais recentes.
Importante: Observe também que o CAPP consiste não apenas em funções de controle robótico, mas também em drivers para câmeras, luzes e outros periféricos. Como resultado, muitas vezes a versão mais recente do Mac OS não é suportada imediatamente. No entanto, se isso ocorrer, será apenas temporário e até que todos os fornecedores relevantes liberem as bibliotecas compatíveis.
Embora isso possa ser inconveniente, é muito menos inconveniente do que problemas de compatibilidade ao usar o CAPP. O downgrade também é ainda mais complicado do que evitar uma atualização prematura.
Depois de atender aos requisitos do sistema operacional e do sistema, a instalação prossegue por meio do assistente do instalador. Faça login na conta PhotoRobot e prossiga com a configuração seguindo as etapas abaixo.
Configuração
Confirmação de consentimento do usuário
Ao baixar o CAPP, a ativação de uma nova conta de usuário requer a confirmação do usuário do contrato de licença de usuário final (EULA) e outros documentos relacionados.
Após a ativação da conta, é possível revisar suas informações de consentimento enviadas por meio da versão em nuvem do CAPP nas configurações do perfil da conta.
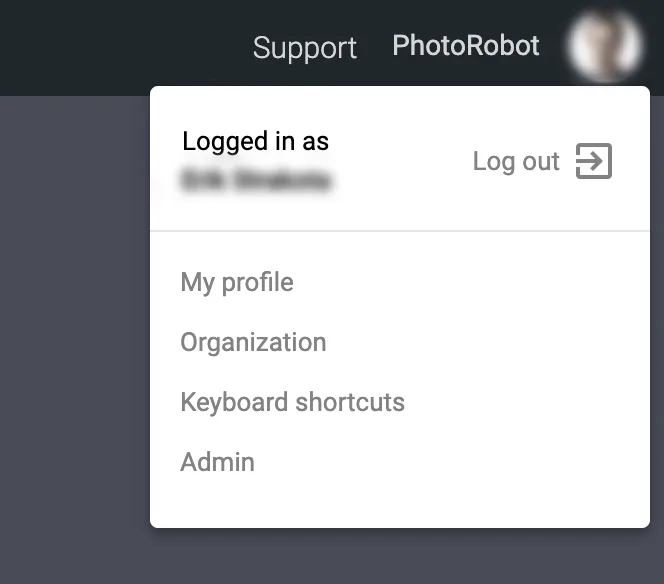
Para verificar suas informações de consentimento, abra a versão em nuvem do CAPP e clique no ícone da conta de usuário no canto superior direito da interface. Em seguida, selecione Meu perfil nas opções do menu.

O menu do perfil exibirá a foto do perfil, informações gerais do usuário (nome, telefone, empresa), configurações de senha e as informações de consentimento. As informações de consentimento incluem:
- Nome do host do computador
- Data acordada
- Contrato de Licença do Programa Internacional PhotoRobot
- Consentimento para o processamento de dados pessoais
- Informações sobre o Tratamento de Dados Pessoais
Câmeras compatíveis
Importante: Para garantir que o CAPP se comunique com a câmera corretamente, feche todos os outros programas que se conectam à câmera. Além disso, certifique-se de usar uma câmera compatível da lista de modelos de câmeras compatíveis com PhotoRobot.
Nota: A partir do lançamento do PhotoRobot Controls App 2.5.4, qualquer câmera pode agora ser suportada através da integração de câmeras de terceiros. No entanto, para fotografia automatizada, os modelos mais recentes de câmeras mirrorless Canon são os mais confiáveis e eficientes.
Embora seja possível usar as câmeras portáteis sugeridas pela PhotoRobot por Wi-Fi ou conexão a cabo, isso pode criar problemas.
- Pode haver desconexões Wi-Fi frequentes (principalmente devido ao tempo limite). Isso requer reconexões demoradas com o sistema.
- Se estiver usando uma câmera portátil via conexão de cabo, há a complicação dos comprimentos dos cabos e o risco para as conexões.
Para conexão de iPhone via PhotoRobot Touch App, observe que nenhum desses problemas ocorre. O iPhone será capaz de fotografia portátil em uma configuração usando iluminação contínua. No entanto, se a fotografia com flash for necessária, câmeras portáteis compatíveis podem servir como uma alternativa às câmeras mirrorless recomendadas. Apenas tenha em mente os problemas que podem surgir com modelos portáteis Wi-Fi e com fio.
Luzes compatíveis
Para que o CAPP se comunique com a iluminação, certifique-se de usar luzes de estúdio compatíveis com PhotoRobot. Estas incluem dois tipos de luzes: luzes estroboscópicas da FOMEI e Broncolor, e qualquer tipo de luzes LED com suporte DMX.
Configuração de Suporte Remoto
Imediatamente após instalar o PhotoRobot Controls, é recomendado que o usuário baixe e instale o aplicativo Splashtop SOS (região da UE). O Splashtop SOS (UE) permite que os técnicos da PhotoRobot acessem o computador de um cliente e forneçam assistência técnica depois que o usuário concede permissão para um caso específico.
Baixar Splashtop SOS ao mesmo tempo que PhotoRobot Controls ajudará a evitar atrasos em solicitações de suporte técnico remoto. Por exemplo, quando um usuário não tem direitos suficientes para instalar o aplicativo. Após instalar o Splashtop, nossos técnicos podem usar instantaneamente o Splashtop Business para acessar o computador com a solicitação de suporte técnico.
No entanto, esteja ciente de que o usuário deve baixar a versão da região da UE do aplicativo Splashtop SOS. O aplicativo da versão da região dos EUA não permite que nossos técnicos acessem seu computador.
Assim, por favor, certifique-se de que está a usar o seguinte link da região da UE para descarregar o Splashtop SOS:
Nota: Para mais informações sobre como configurar o suporte remoto para sistemas PhotoRobot, consulte Configuração do Suporte Remoto PhotoRobot.
Criando um espaço de trabalho
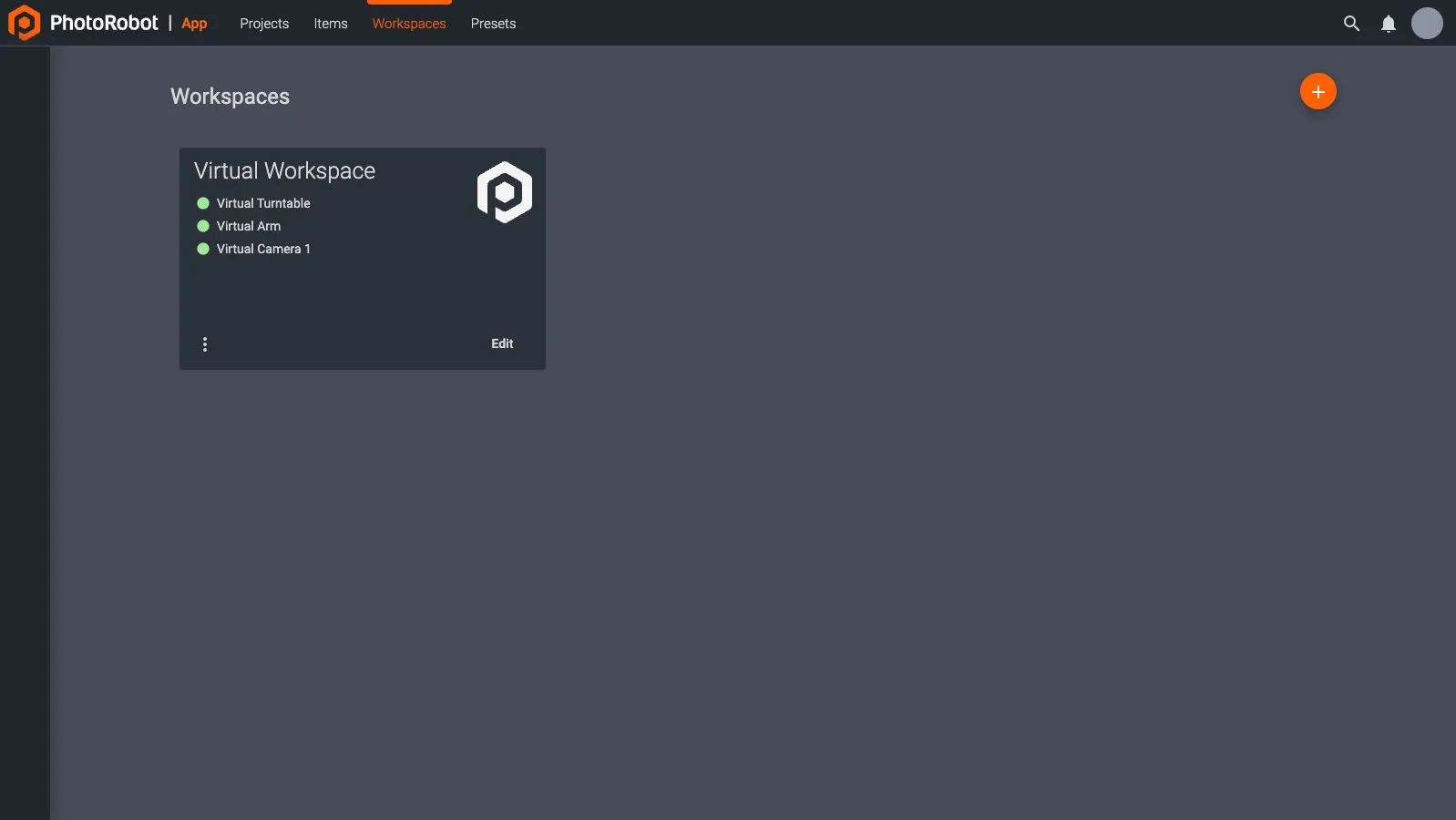
Depois de abrir o CAPP, normalmente a primeira coisa que um usuário faz é criar um espaço de trabalho. Um espaço de trabalho é uma lista de hardware que está sendo usado para uma sessão fotográfica em particular. Pode incluir vários módulos de PhotoRobot, câmeras, luzes e outros acessórios.
Para fins de demonstração, os usuários podem trabalhar com um espaço de trabalho predefinido, Sample Workspace, que é configurado para usar hardware virtual. Desta forma, os usuários ainda podem experimentar vários recursos do CAPP selecionando robôs virtuais e câmeras.
Hardware de conexão
Para começar a usar hardware real (em oposição ao virtual), primeiro certifique-se de que o hardware esteja conectado à mesma rede de computadores (ou a uma sub-rede) que o computador que você está usando para controlar seu PhotoRobot.
Nota: A partir da versão 2.5.4 do PhotoRobot Controls, qualquer câmera pode agora ser suportada através da integração de câmeras de terceiros. Enquanto isso, as câmeras compatíveis incluem uma variedade de modelos de câmeras Canon, nossas câmeras Canon recomendadas com Wi-Fi, e também câmeras iPhone se estiver usando o PhotoRobot Touch App.
Importante: Para fotografia automatizada por estação de trabalho ROBOTIC, os modelos de câmera mirrorless Canon recomendados pela PhotoRobot são os mais confiáveis. Embora haja suporte para câmeras portáteis via Wi-Fi ou conexão por cabo, o uso delas pode criar problemas. Isso inclui desconexões frequentes de Wi-Fi (principalmente devido a tempo limite), complicações com o comprimento dos cabos e o risco para as conexões.
Para conectar uma câmera, ela deve estar conectada à mesma rede de computadores local que o robô de uma das três maneiras:
- Conexão direta via USB à rede local;
- Ligação de uma câmara portátil recomendada através de um protocolo Wi-Fi especial (acessível na aplicação Tool da Canon na Canon Developer Page);
- Integração de um ou vários iPhones através do aplicativo PhotoRobot Touch. (Para obter instruções sobre como usar um iPhone com o PhotoRobot, consulte o Manual do usuário do aplicativo iPhone Touch.)
Depois de conectar uma peça de hardware (ou câmera) a um espaço de trabalho, você pode verificar se ela está online (reconhecida pelo CAPP). Para fazer isso, inspecione o ponto à esquerda do nome do equipamento em questão. Se o dispositivo for reconhecido, haverá um ponto verde.
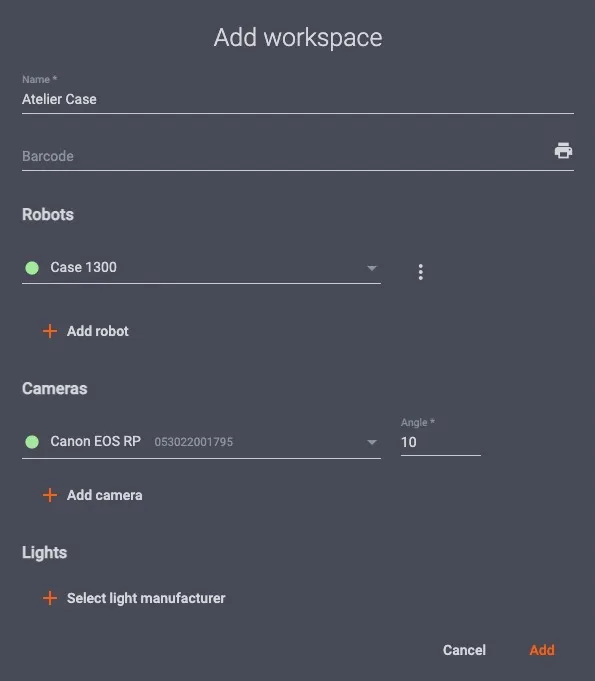
Um ponto cinza ao lado do nome do dispositivo sinaliza que o hardware não foi reconhecido ou não está ligado. Se houver um ponto vermelho, há um erro, como o usuário não ter mudado a câmera para o modo manual, por exemplo. Para identificar a causa do erro, passe o mouse sobre o ponto vermelho para exibir uma dica de ferramenta com uma descrição do erro que está ocorrendo.
Para o guia completo passo a passo de como conectar hardware para configurar um espaço de trabalho, consulte Configurar um Espaço de Trabalho PhotoRobot.
Se estiver a ter problemas, consulte Resolução de Problemas PhotoRobot para problemas comuns e suas soluções.
Configuração da altura do braço do robô
Se estiver usando um braço robótico no espaço de trabalho, observe que provavelmente haverá necessidade de configuração adicional. Isso ocorre porque o braço robótico é uma máquina independente, e uma das funções de controlá-lo via CAPP é que o movimento de elevação alinha o eixo de rotação ao ponto médio da altura do objeto fotografado.
A altura do eixo de rotação do braço robótico é determinada pelo tipo de máquina da estação de trabalho e, ao mesmo tempo, pelo ajuste dos pés niveladores, que compensam qualquer irregularidade do piso. Se tudo estiver configurado corretamente, a máquina está nivelada e o centro de rotação está a uma altura específica acima do chão. No entanto, a altura total também dependerá da altura da superfície da plataforma giratória, que varia entre os diferentes robôs. Isso significa que pode haver uma discrepância na referência de altura, pois há um adaptador de altura sob a coluna do braço do robô para que ele se alinhe aproximadamente.
Para garantir o alinhamento perfeito, torna-se necessário inserir a diferença de altura entre o braço e a plataforma giratória no CAPP. A diferença de altura mede a distância exata entre o eixo de rotação do braço robótico e a altura em que a superfície da plataforma giratória está posicionada (incluindo qualquer placa adicional colocada em cima dela). Isso fornece as dimensões exatas a partir das quais o sistema calcula metade da altura do objeto e a posição em que o braço deve se mover. Também garante que o sistema esteja configurado para operar de forma automática e correta.
Observe também: O sistema está configurado para rejeitar valores que estão fora do intervalo válido para uma determinada configuração.
Definir Elevador do Braço Robótico para Nível Zero
Para definir o elevador do Braço Robótico para o nível zero, primeiro abra a versão local do CAPP e aceda às Definições do Espaço de Trabalho de uma de duas formas:
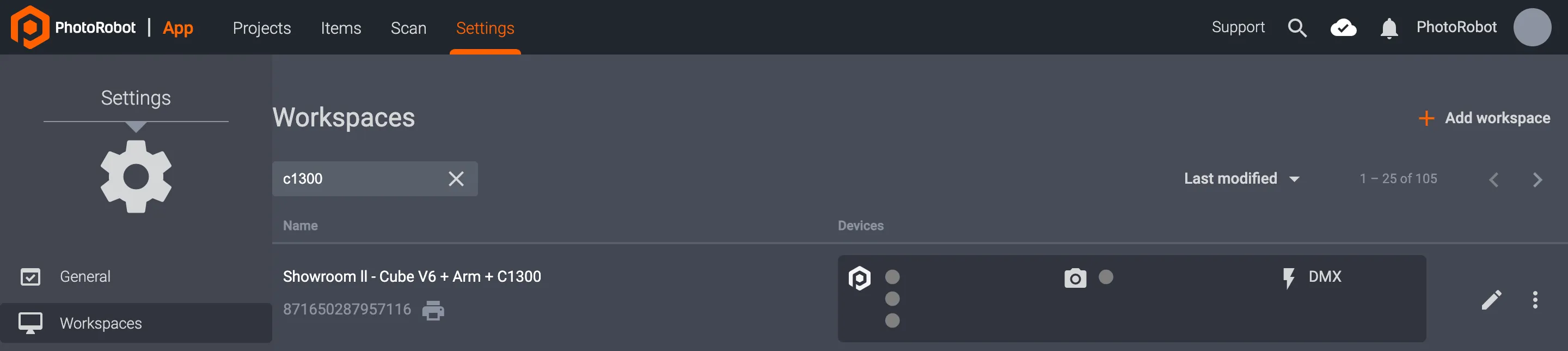
1. Abra a versão local do CAPP, clique em Configurações na parte superior da interface e selecione Espaços de trabalho nas opções do menu à esquerda. Neste menu, encontre o espaço de trabalho em operação e clique no ícone de edição ao lado do título do espaço de trabalho para abrir as configurações Editar espaço de trabalho:
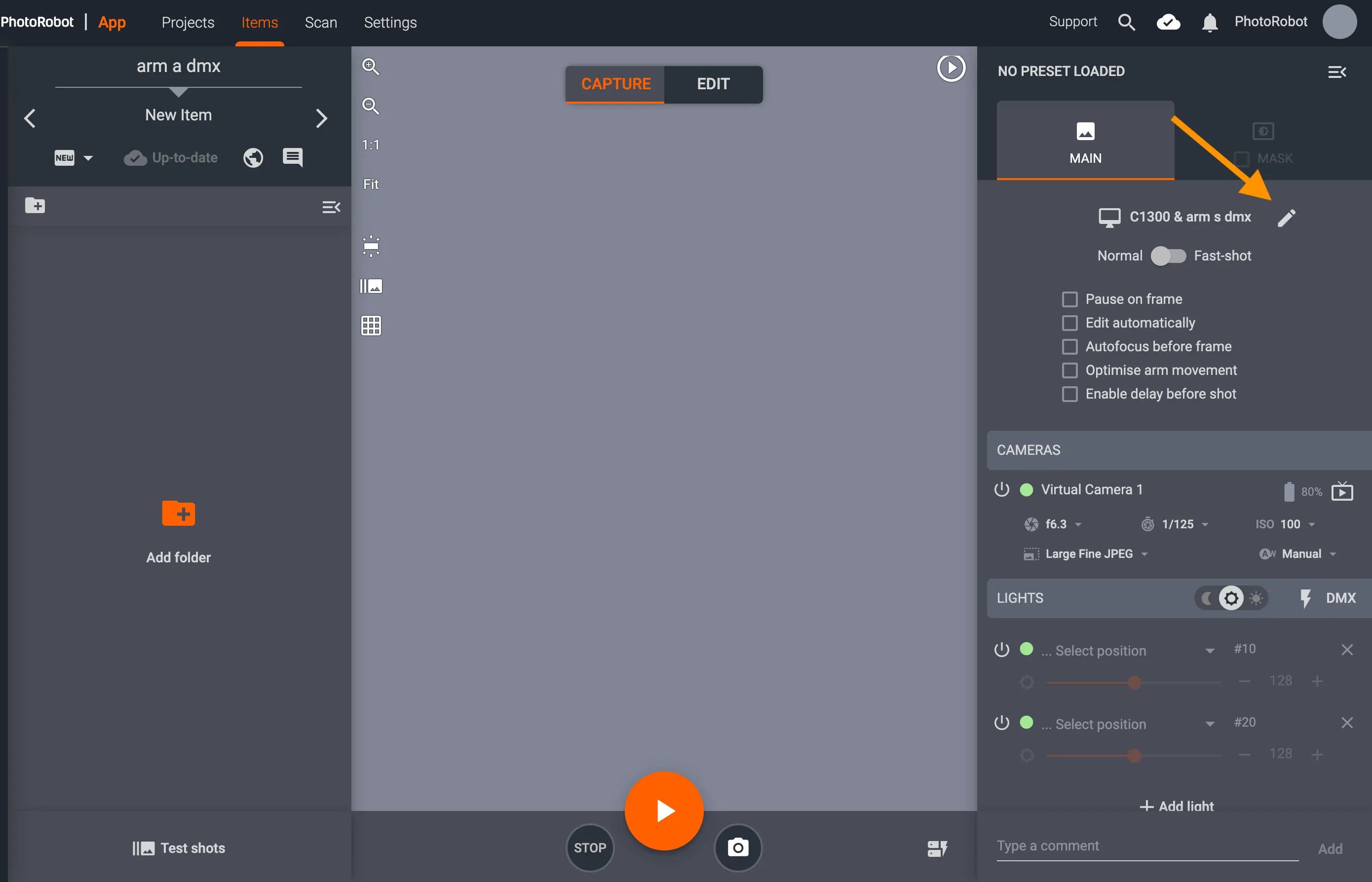
2. Como alternativa, é possível acessar o menu Editar espaço de trabalho abrindo um Item no modo Captura na versão local do CAPP e clicando no ícone de edição ao lado do título do Espaço de Trabalho no lado direito da interface:
Qualquer um dos métodos abrirá as configurações do espaço de trabalho Editar. Em seguida, para configurar o braço do robô, encontre o dispositivo no menu Robôs e clique nos 3 pontos verticais ao lado do nome do braço do robô.
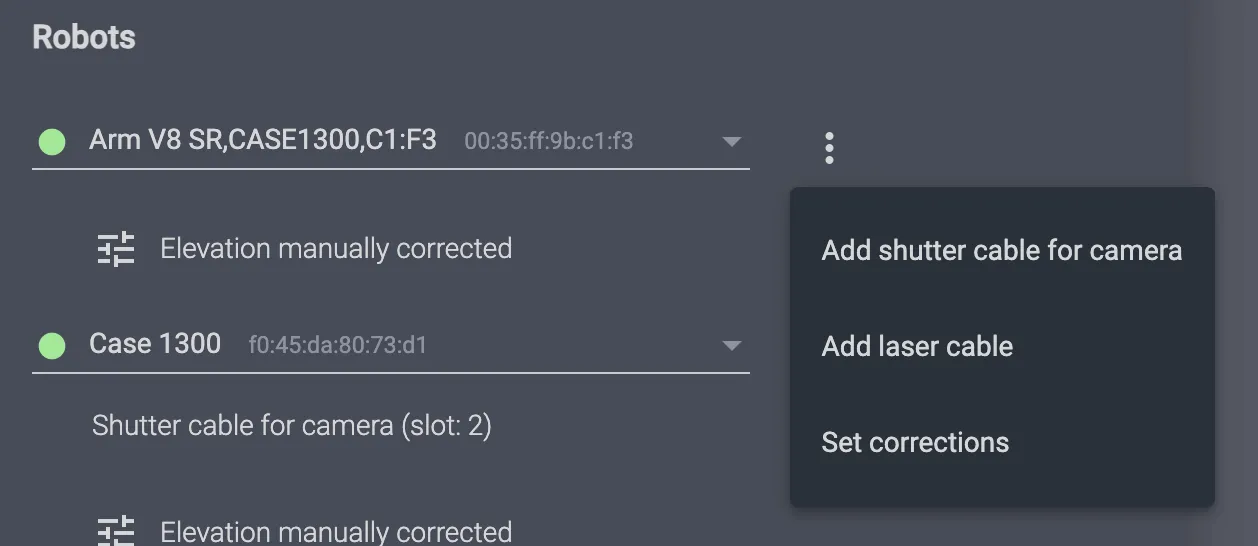
Em seguida, selecione a opção de menu Definir correções para abrir a função Definir correção do elevador :
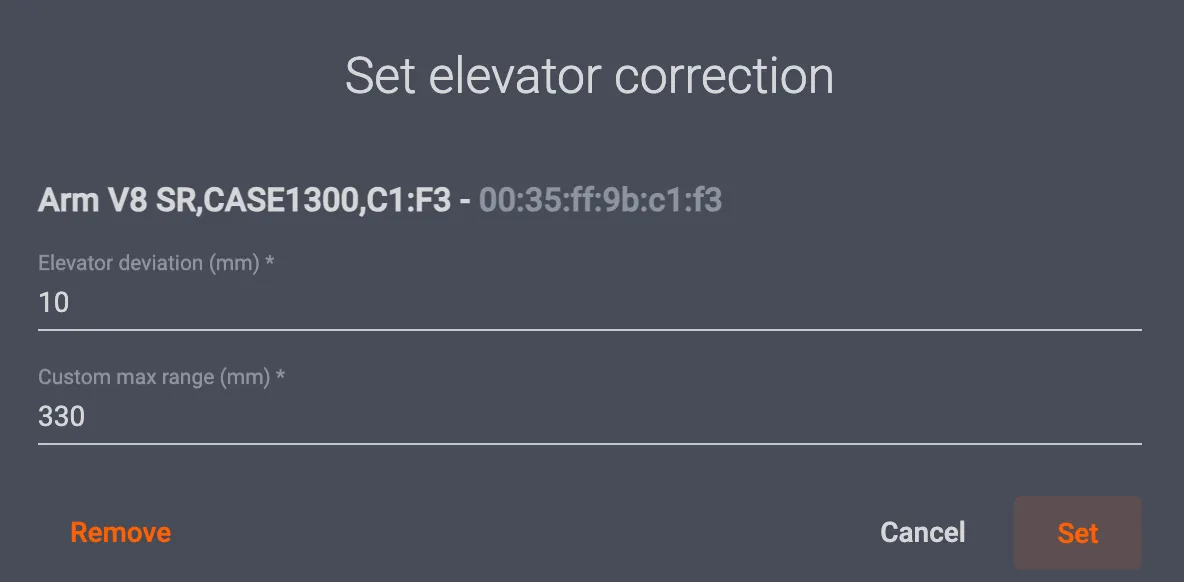
No menu Definir correção do elevador, ajuste o número no campo superior Desvio do elevador (mm) para definir a elevação da câmera para o nível zero apropriado. Por exemplo, se a câmera estiver fora do centro 10 mm acima da mesa, defina Desvio do elevador para -10 mm para centralizar a câmera.
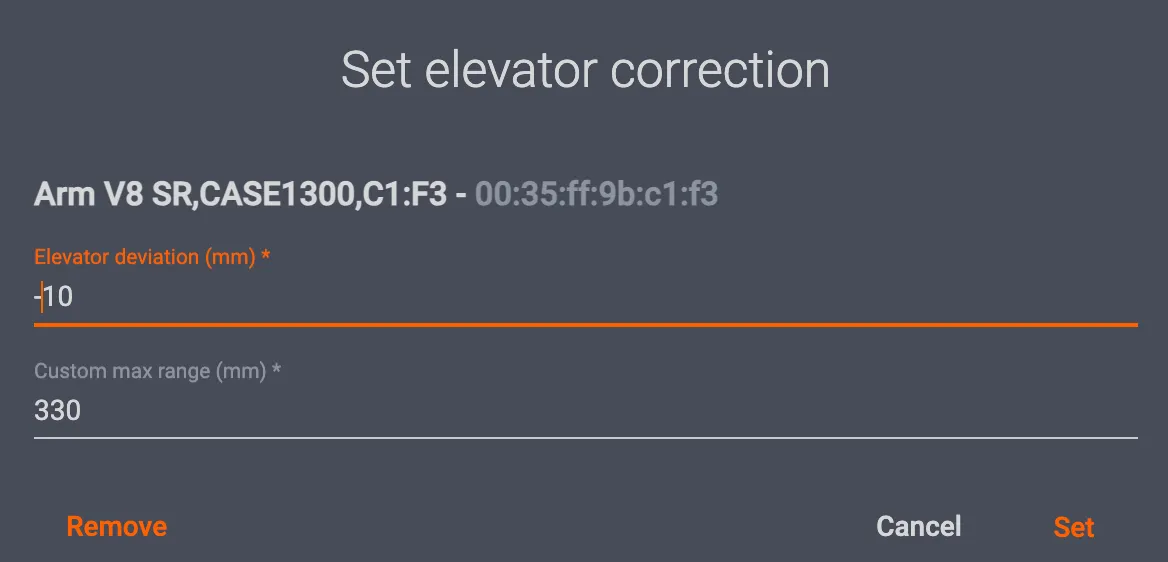
Se a câmera estiver descentralizada 10 mm abaixo da mesa, defina o desvio do elevador para +10 mm. Isso alinhará corretamente a elevação da câmera montada no braço do robô para o nível zero apropriado no software.
Nota: A elevação pode atingir um máximo de 330 mm. Assim, se ajustar o nível zero em +30 mm, a elevação máxima só pode chegar a 300 mm. Isso significa que o sistema só poderá capturar produtos menores por essa margem, 30 mm ou menos.
Gerenciamento de arquivos - Projetos, Itens e Pastas
No CAPP, as imagens são organizadas em projetos, itens e pastas.
- Um projeto é a entidade de dados de alto nível. Normalmente, um projeto incluirá itens de uma única sessão fotográfica ou talvez um único dia de filmagem/semana.
- Os projetos consistem em um ou mais itens. Um único item normalmente será um objeto específico e fotografado.
- Um item inclui uma ou mais pastas. No CAPP, você pode ter várias pastas em um único item, a fim de manter diferentes tipos de imagens separadas. Um exemplo muito comum é ter uma pasta para uma apresentação rotativa de 360° (chamada "spin"), enquanto usa outra para armazenar imagens estádas ("stills").
Para começar a fotografar, você deve primeiro adicionar um novo projeto (a menos que você já tenha um que gostaria de usar), bem como pelo menos um item.
( ! ) - Se tiver problemas, encontre suporte adicional para conectar câmeras, robôs, luzes e edição no Manual de Solução de Problemas do PhotoRobot.
Configurações gerais - Backup automático na nuvem, processamento, aplicativo de toque
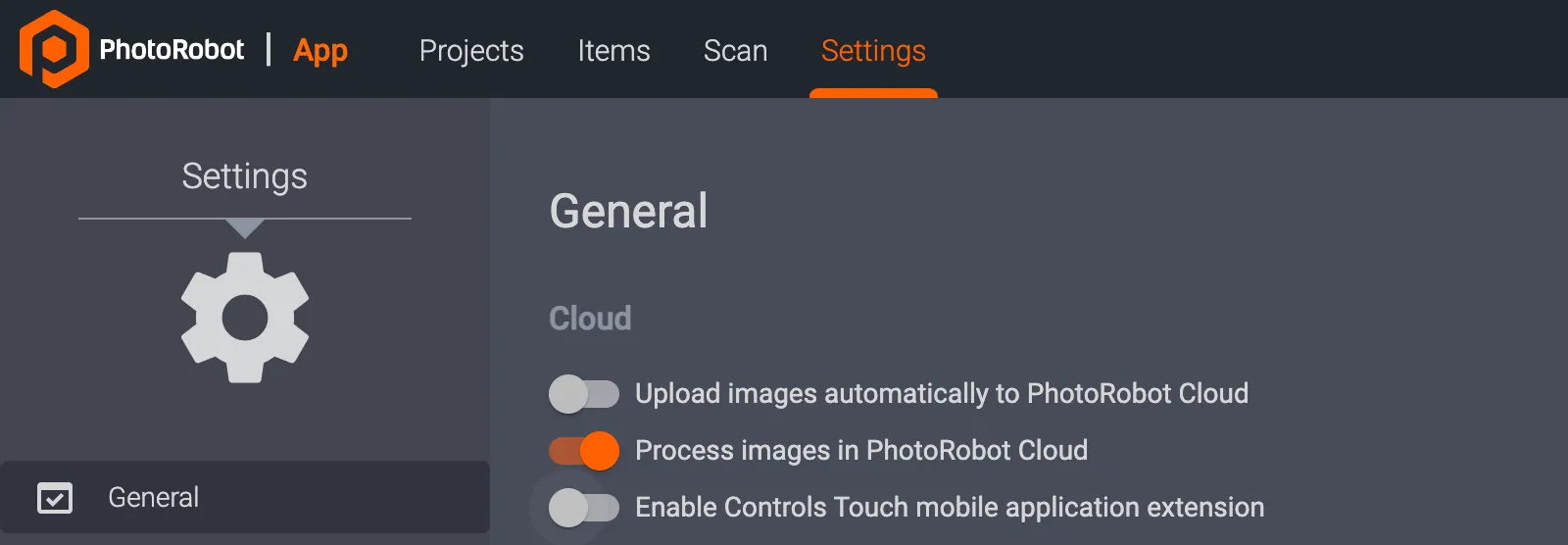
Na versão para desktop local do CAPP, existem 3 configurações gerais para ativar ou desativar:
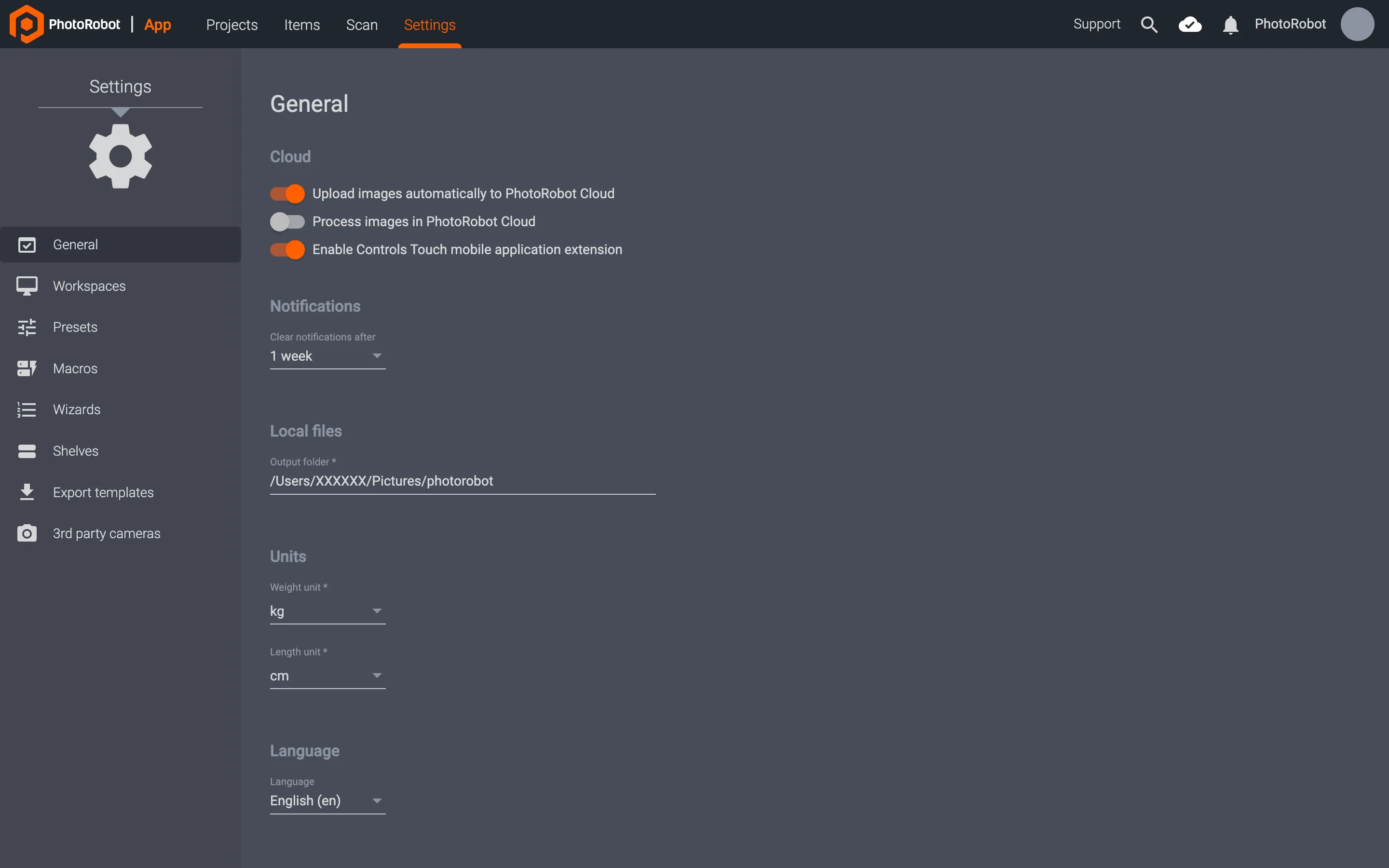
- Carregue imagens automaticamente para o PhotoRobot Cloud
- Processar imagens no PhotoRobot Cloud
- Ativar Extensão de Aplicativo Móvel de Toque de Controles
Por padrão, o aplicativo local será definido como Carregar imagens automaticamente para o PhotoRobot Cloud. Esse recurso salva automaticamente um backup das imagens capturadas em seu servidor em nuvem para exportação posterior.
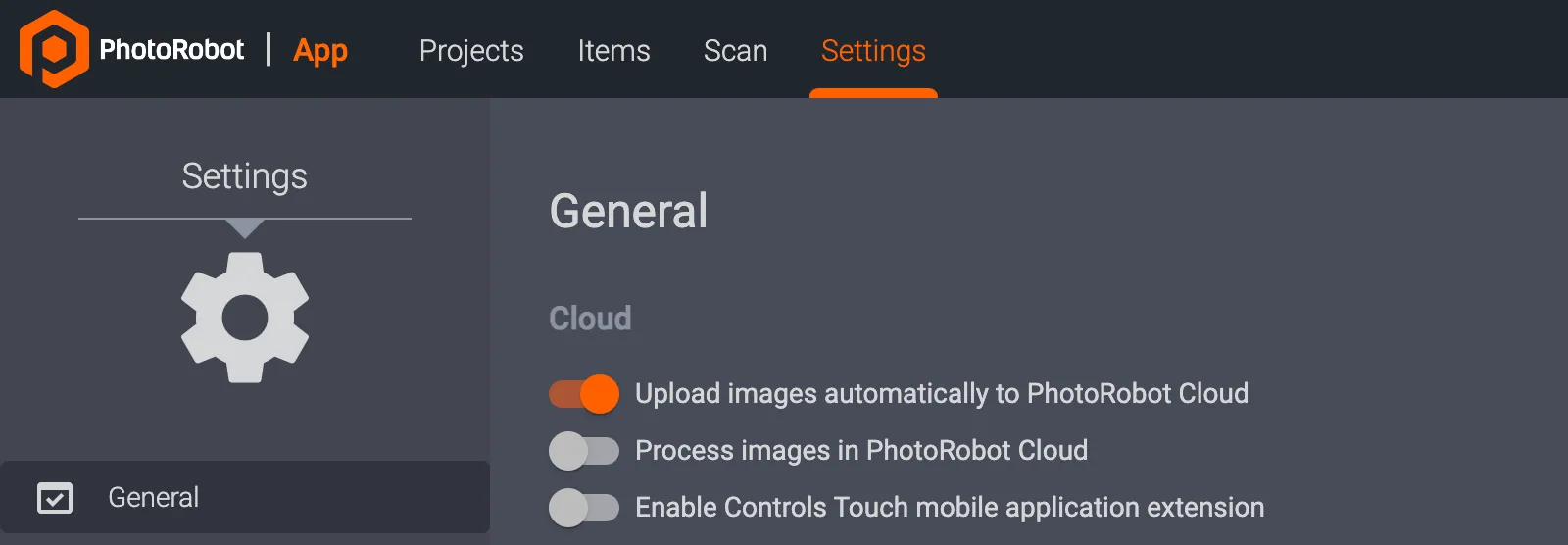
Para desativar o upload de imagens automaticamente para o PhotoRobot Cloud, desative a opção na versão local das Configurações gerais do CAPP. Em vez disso, isso salvará os itens capturados em seu aplicativo local ou em sua própria conta na nuvem.
Use as alternâncias também para ativar ou desativar o recurso Processar imagens no PhotoRobot Cloud. Quando ativado, esse recurso pós-processa automaticamente as imagens de acordo com as predefinições no PhotoRobot Cloud após a captura.
Se estiver usando o aplicativo móvel PhotoRobot Touch para iPhone, ative a opção Ativar extensão do aplicativo móvel Controls Touch.
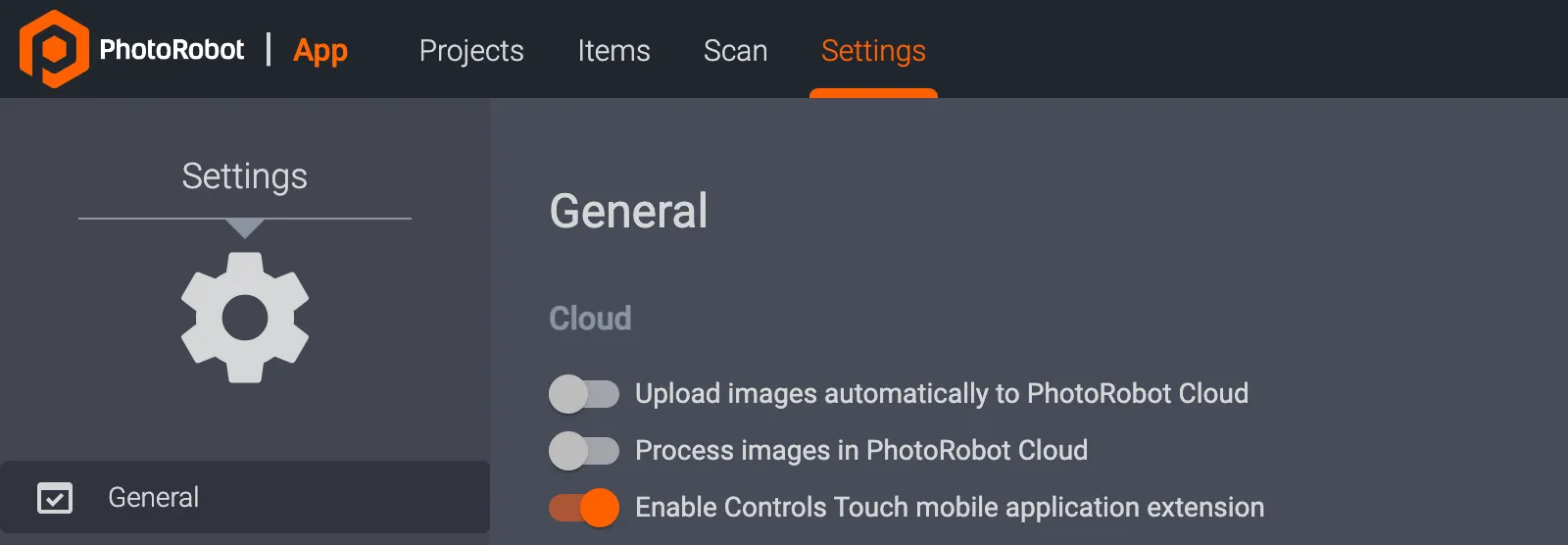
Nota: Para obter instruções técnicas sobre a instalação e operação do PhotoRobot Touch, consulte o Manual do usuário do aplicativo PhotoRobot iPhone Touch.
Configurações Gerais - Criar Novo Item Automaticamente
Além disso, nas Configurações gerais na versão para desktop local do CAPP, há as configurações do Leitor de código de barras que permitem a configuração de opções avançadas para o leitor de código de barras. Use o botão de alternância à esquerda de Criar automaticamente um novo item no sistema quando um código de barras desconhecido for lido para habilitar ou desabilitar a criação automática de itens.
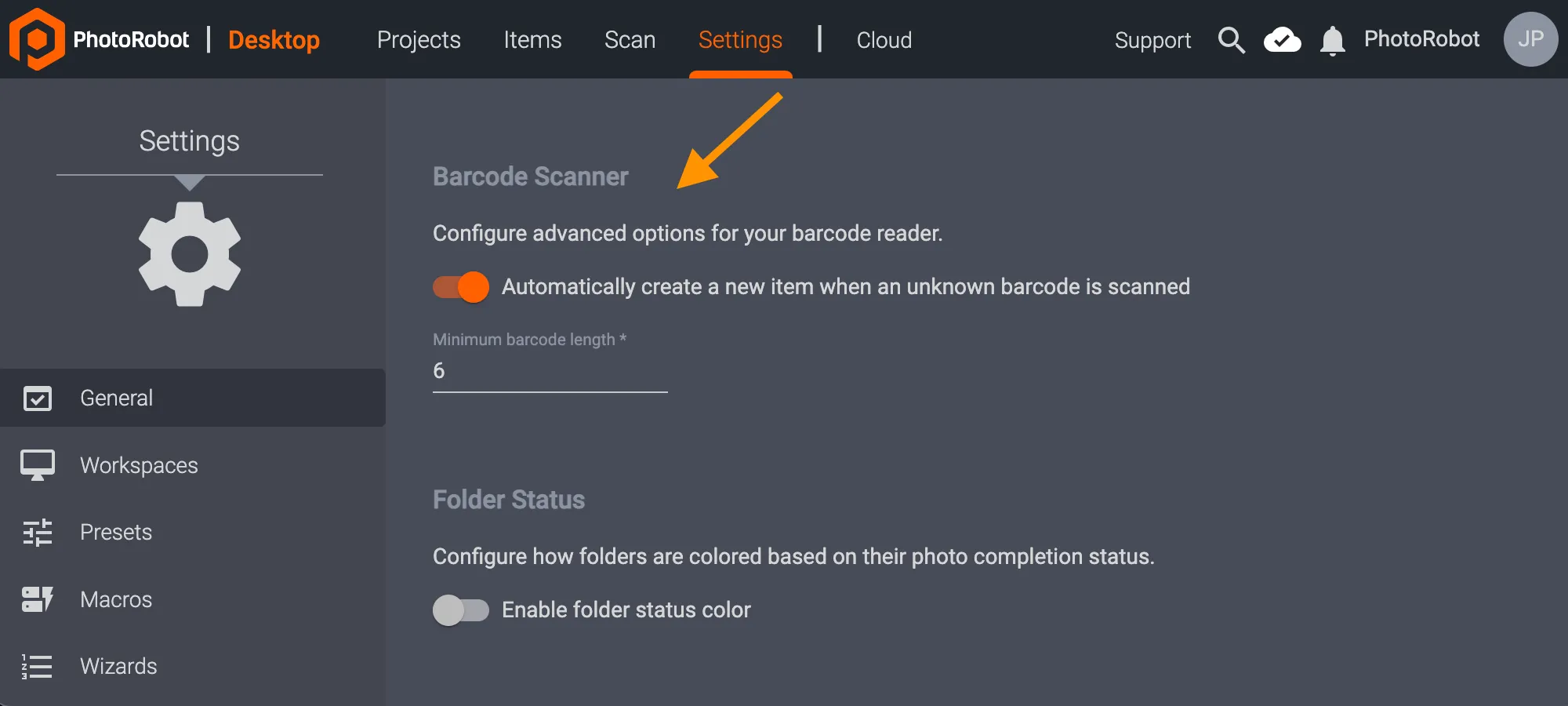
Quando ativa, a configuração funcionará como uma alternativa à criação manual de itens. Ele permite a identificação de um item no ponto de captura (normalmente via código de barras ou código QR). Um operador simplesmente verifica um código desconhecido e um novo item é criado automaticamente no projeto. A nomenclatura do item será de acordo com a string digitalizada e no campo identificador do item. Em seguida, o operador fotografa o item.
Dessa forma, não há necessidade de realizar nenhuma operação relacionada ao inventário no software do estúdio. Por exemplo, basta digitalizar um novo item e, posteriormente, digitalizar um código predefinido (prateleira) para a fotografia (por exemplo, para itens brancos, escuros ou coloridos). O sistema entregará automática e imediatamente um conjunto completo de fotografias, pós-processá-las totalmente e distribuí-las com nomenclatura automática para o sistema de destino.
Além disso, a partir da versão 2.13.beta58 do CAPP, agora há a opção de configurar o comprimento mínimo da string para códigos de barras. Anteriormente, o comprimento mínimo do código de barras/código QR era de 6 caracteres (para evitar interpretações duplas da string digitalizada, entre outros problemas). Agora, a configuração Comprimento mínimo do código de barras é ajustável para permitir, por exemplo, que identificadores de quatro caracteres funcionem sem a necessidade de ajustes adicionais.
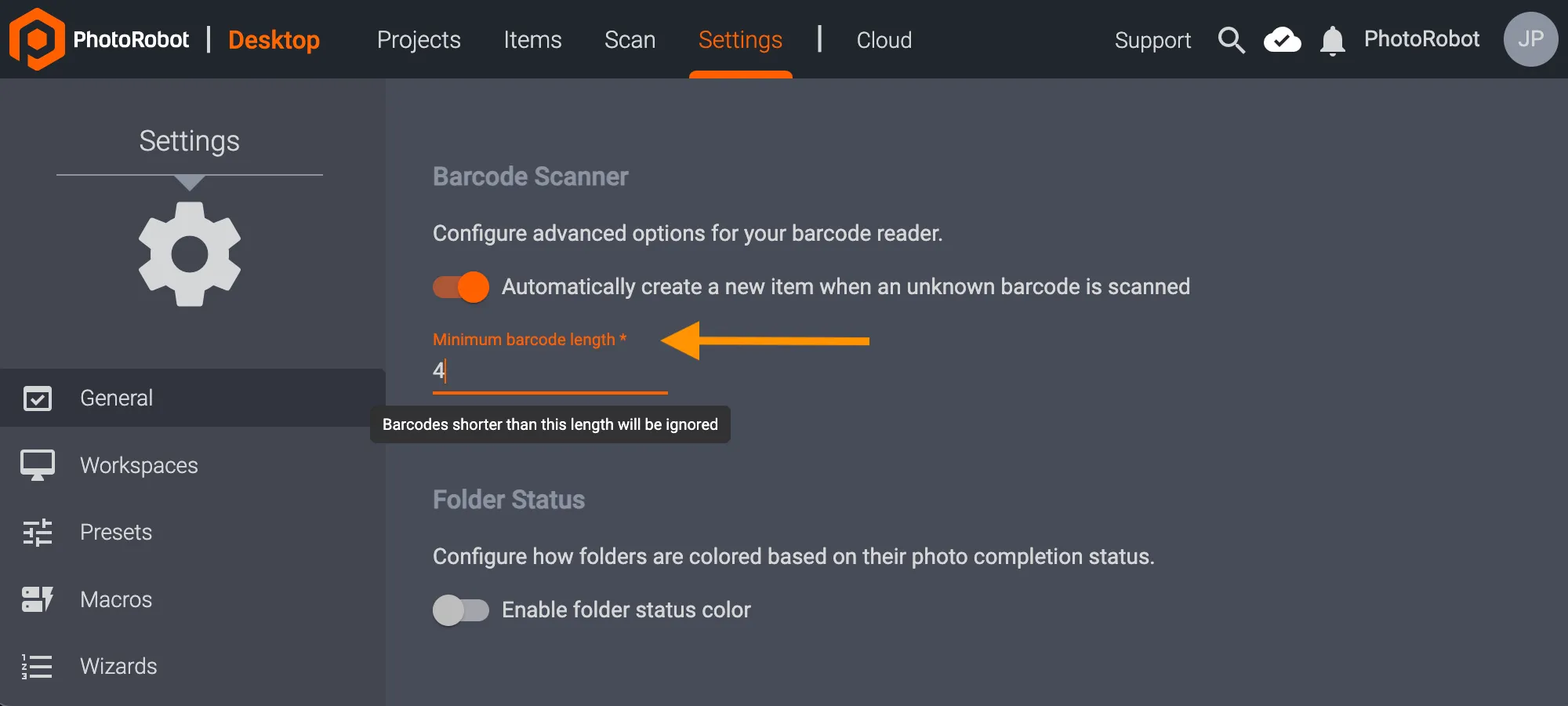
Para ajustar o comprimento mínimo da string para códigos de barras / códigos QR, configure o comprimento mínimo do código de barras também na versão local do CAPP em Configurações gerais - Leitor de código de barras. Códigos de barras menores que a entrada de comprimento serão ignorados pelo sistema.
Nota: Depois que um item receber um código de barras no sistema, o código de barras também estará acessível diretamente na interface do modo de captura na área de informações do item por meio de um botão de código de barras.
Concedendo ao cliente acesso externo aos dados do projeto
Para trabalhar com clientes fora da organização de uma conta CAPP paga, um administrador da conta pode criar contas de cliente gratuitamente. As contas de cliente permitem que um cliente externo visualize dados do projeto, participe da garantia de qualidade por meio de revisão e comentários e acesse ativos do projeto para download. Esse recurso destina-se a situações em que um estúdio fotográfico está trabalhando com um cliente externo que requer acesso a trabalhos específicos.
Para compartilhar um projeto com um cliente fora da sua organização, primeiro certifique-se de fazer login na versão em nuvem do CAPP usando um perfil de usuário com privilégio de administrador.
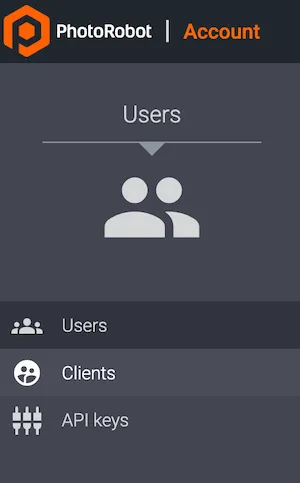
1. Faça login no aplicativo baseado em nuvem usando um perfil de conta CAPP pago com privilégio de administrador e clique no ícone do menu do perfil do usuário no canto superior direito do painel. Em seguida, clique em Organização para acessar o painel de administração.
2. Em seguida, no painel de administração da organização, clique em Usuários nas opções da conta na parte superior da interface do usuário.

3. Clique em Clientes para criar uma nova opção de usuário para acessar o recurso adicionar clientes na interface da conta. O botão + Adicionar clientes aparecerá no canto superior direito do painel sob o ícone do perfil do usuário.
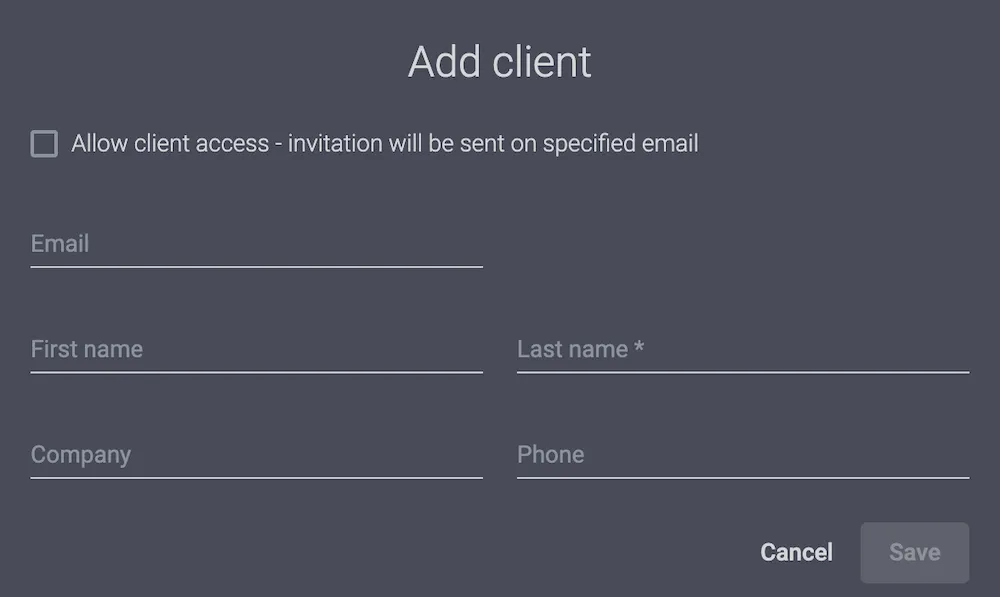
4. Clique em + Adicionar cliente no ícone do perfil do usuário.
5. Preencha os campos para as informações do cliente (e-mail, nome, empresa, telefone) e marque a caixa Permitir acesso do cliente. Revise as informações quanto à precisão e clique em Salvar para adicionar o cliente ao CAPP.
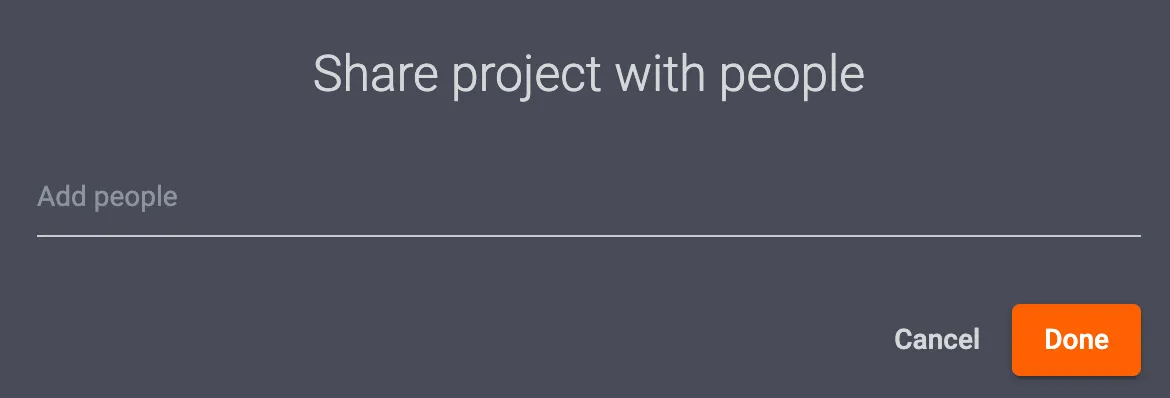
6. Abra Projetos na versão em nuvem do CAPP, encontre o projeto que deseja compartilhar com o cliente salvo, passe o mouse sobre a barra do projeto e clique no ícone de compartilhamento à direita dos detalhes do projeto.
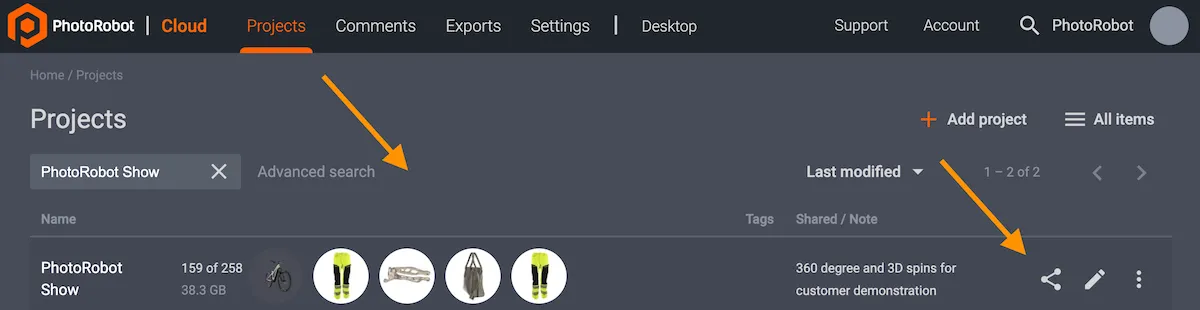
7. Clique no ícone de compartilhamento no lado direito da barra do projeto para abrir o recurso Compartilhar projeto com pessoas , selecione clientes salvos e clique em concluído. O projeto agora é compartilhado com o cliente, permitindo que ele visualize o trabalho e comente no CAPP para garantia de qualidade e instruções adicionais, se necessário.
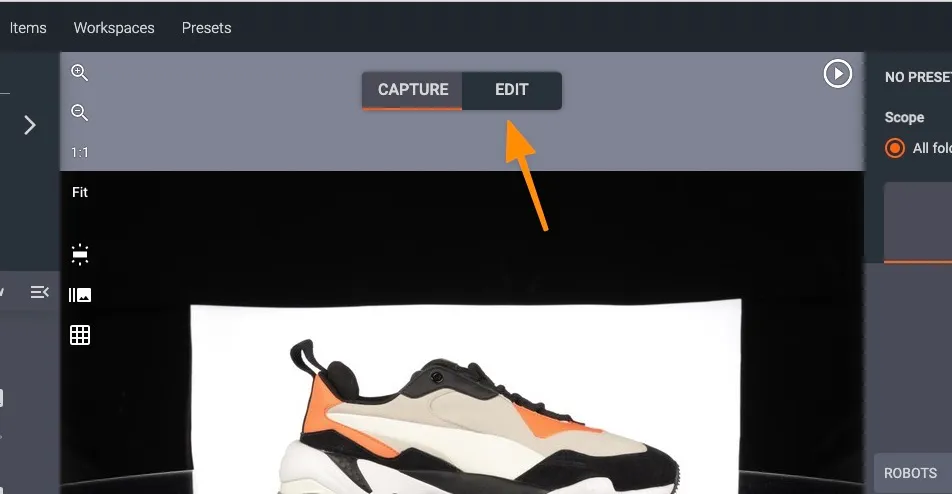
Interface do modo de captura
Depois de clicar em um item, você será levado para uma interface de captura/edição. Os controles disponíveis para você mudam com base em se o modo de captura está ativo ou no modo de edição . O modo de captura é usado para controlar a sequência de fotografia, enquanto o modo de edição controla todos os pós-processamento realizados dentro do CAPP. O modo ativo será destacado na parte superior da tela:
Adicionando uma pasta de spins, stills ou vídeo
Antes de qualquer sessão fotográfica, você deve criar pelo menos uma pasta. Os principais tipos de pastas são spin (usado para apresentações 360°), alambiês (para imagens estádas) e vídeo (para vídeos).
Criando uma pasta spins
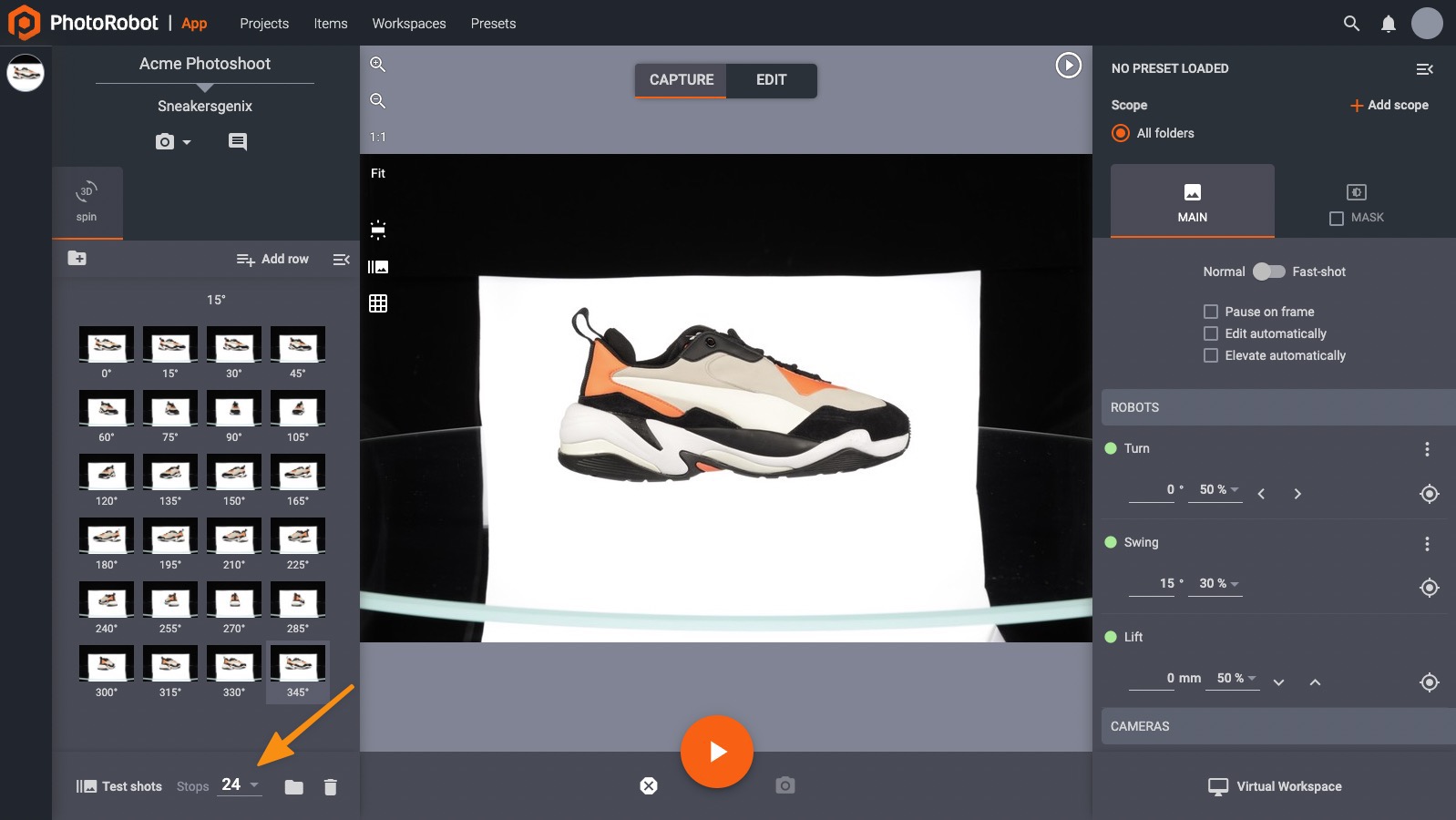
Ao adicionar uma pasta de spin, o CAPP adicionará automaticamente paradas (também chamadas de "quadros") com base em quantas imagens por spin você selecionar. O número padrão é 36, e isso pode ser alterado no canto inferior esquerdo. Com um número maior de paradas, a rotação será mais suave, mas também ocupará mais espaço de armazenamento.
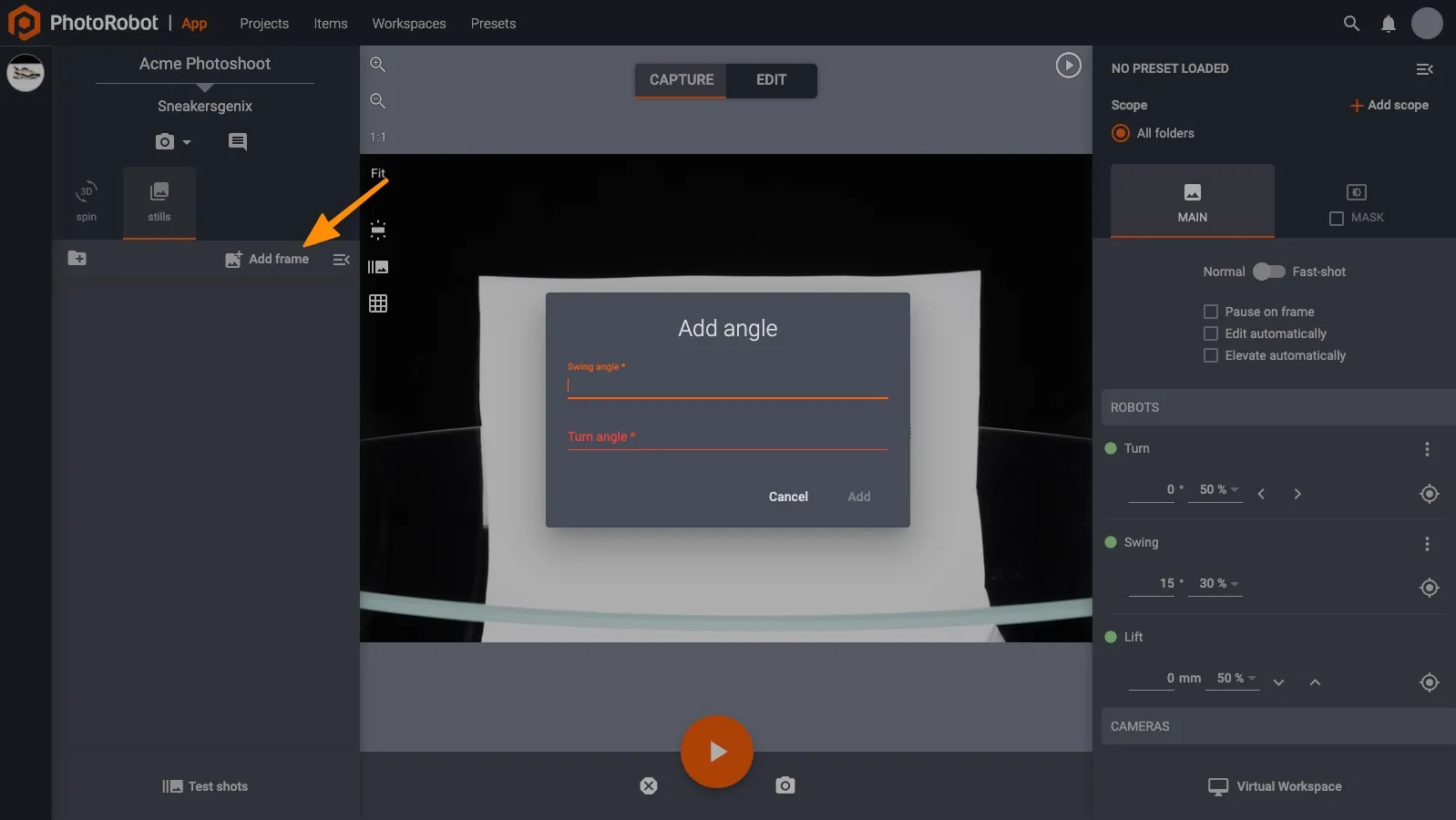
Criando uma pasta Stills
Se você selecionar uma pasta stills, você deve adicionar suas paradas manualmente. Isso incluirá um ângulo de giro (o ângulo de rotação) e um ângulo de balanço (a posição vertical da câmera ao longo de uma trajetória circular). O ângulo de balanço é importante se você estiver usando nosso Braço Robótico ou outro módulo que pode alterar a posição horizontal da câmera.
Importar imagens
Em alguns casos, você pode querer importar imagens para uma pasta nova ou existente no CAPP. Tomemos, por exemplo, a importação de fotos com a câmera na mão, fotos detalhadas ou outras imagens diversas.
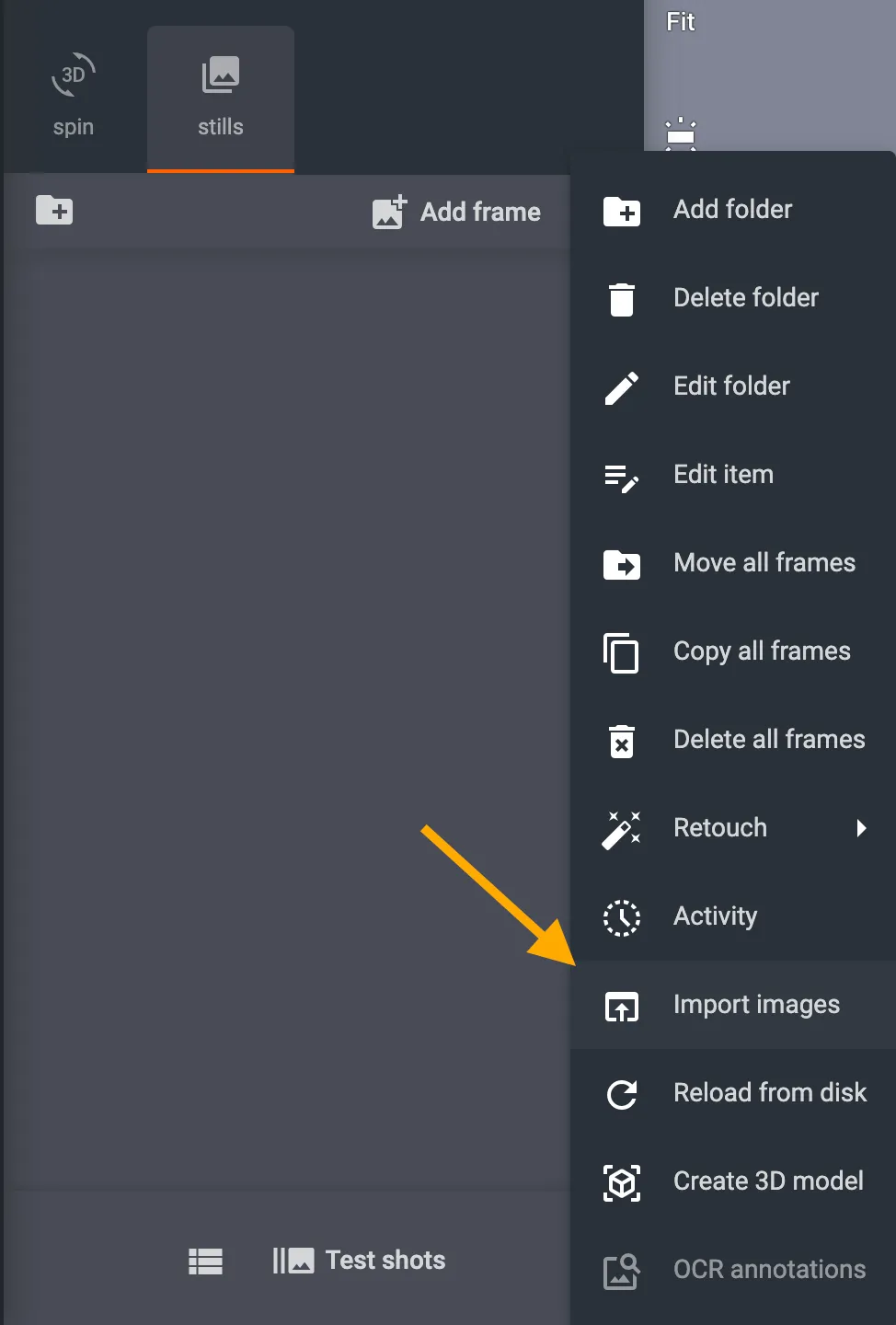
Para importar imagens para o CAPP, primeiro abra um item novo ou existente na interface do modo de captura no CAPP. Em seguida, clique no ícone do menu de operações da pasta no canto superior direito da interface das pastas.
Em seguida, nas opções do menu de operações da pasta, localize e clique em Importar imagens da lista.
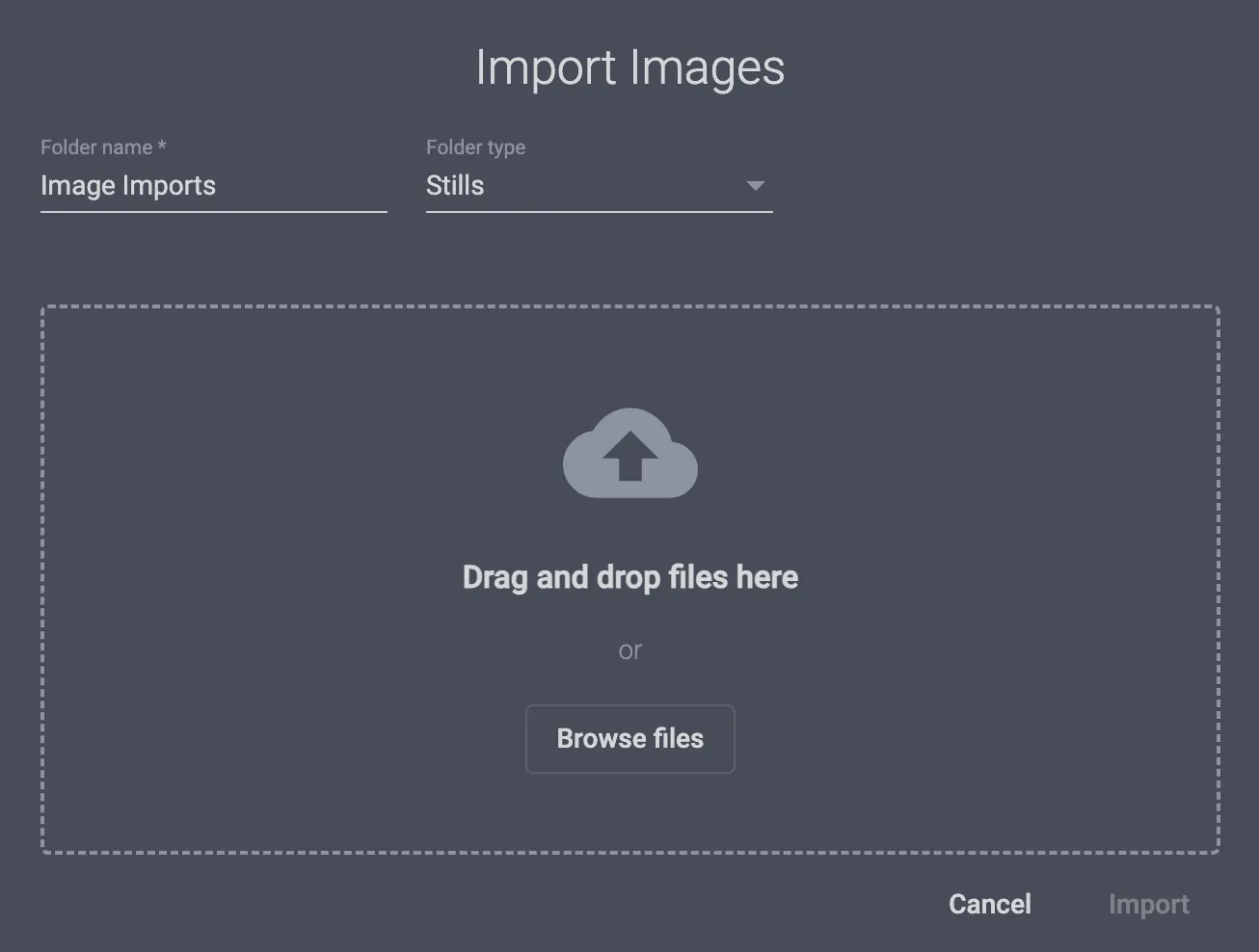
Clicar em Importar imagens abrirá uma janela pop-up que permite a importação de imagens arrastando e soltando ou navegando em arquivos locais. Na parte superior da janela, também é possível configurar o nome da pasta e o tipo de pasta para as imagens importadas.
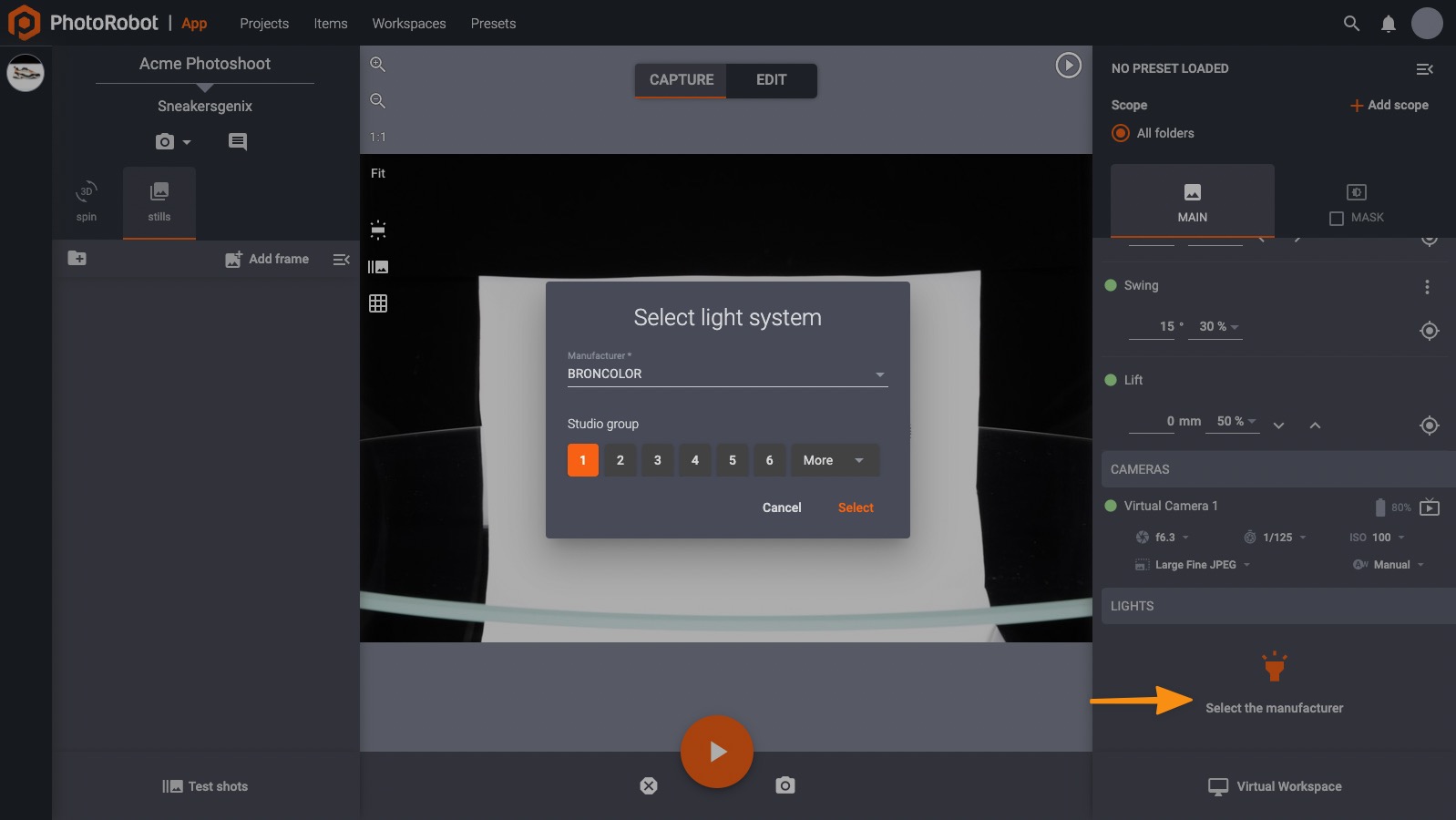
Luzes compatíveis de controle
Ao usar luzes compatíveis com CAPP, você pode selecionar luzes no canto inferior direito da janela do modo editar.
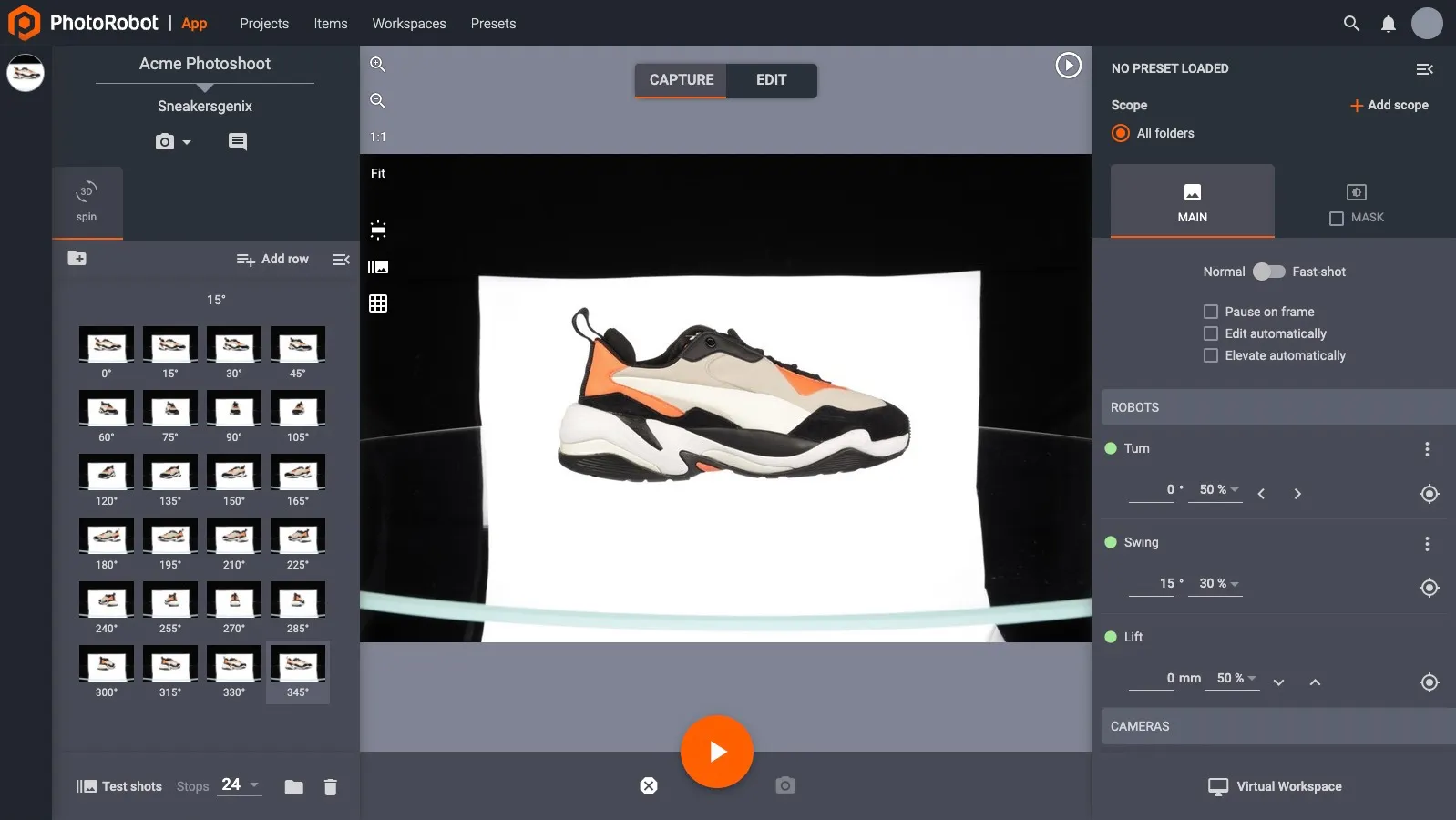
Visão geral da interface do modo de captura
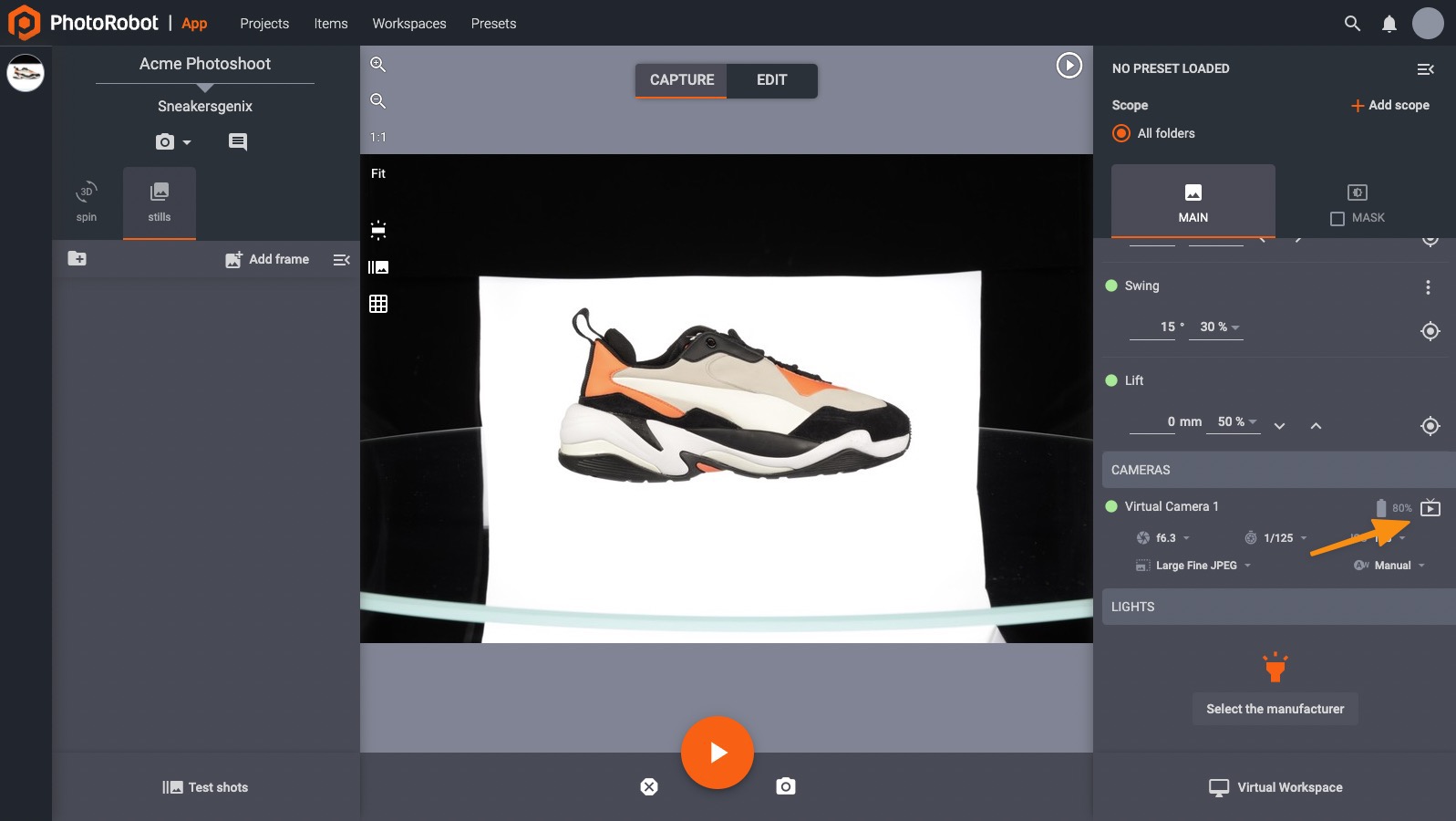
A parte central da interface do modo de captura inclui a janela de visualização, que exibe a imagem selecionada no momento (se você já tiver tirado alguma) ou a visualização ao vivo transmitida da câmera.
O Live View, que é útil se você quiser verificar a compostura e o foco, pode ser alternado na área de controle da câmera na parte central da barra de controle no lado direito da tela.
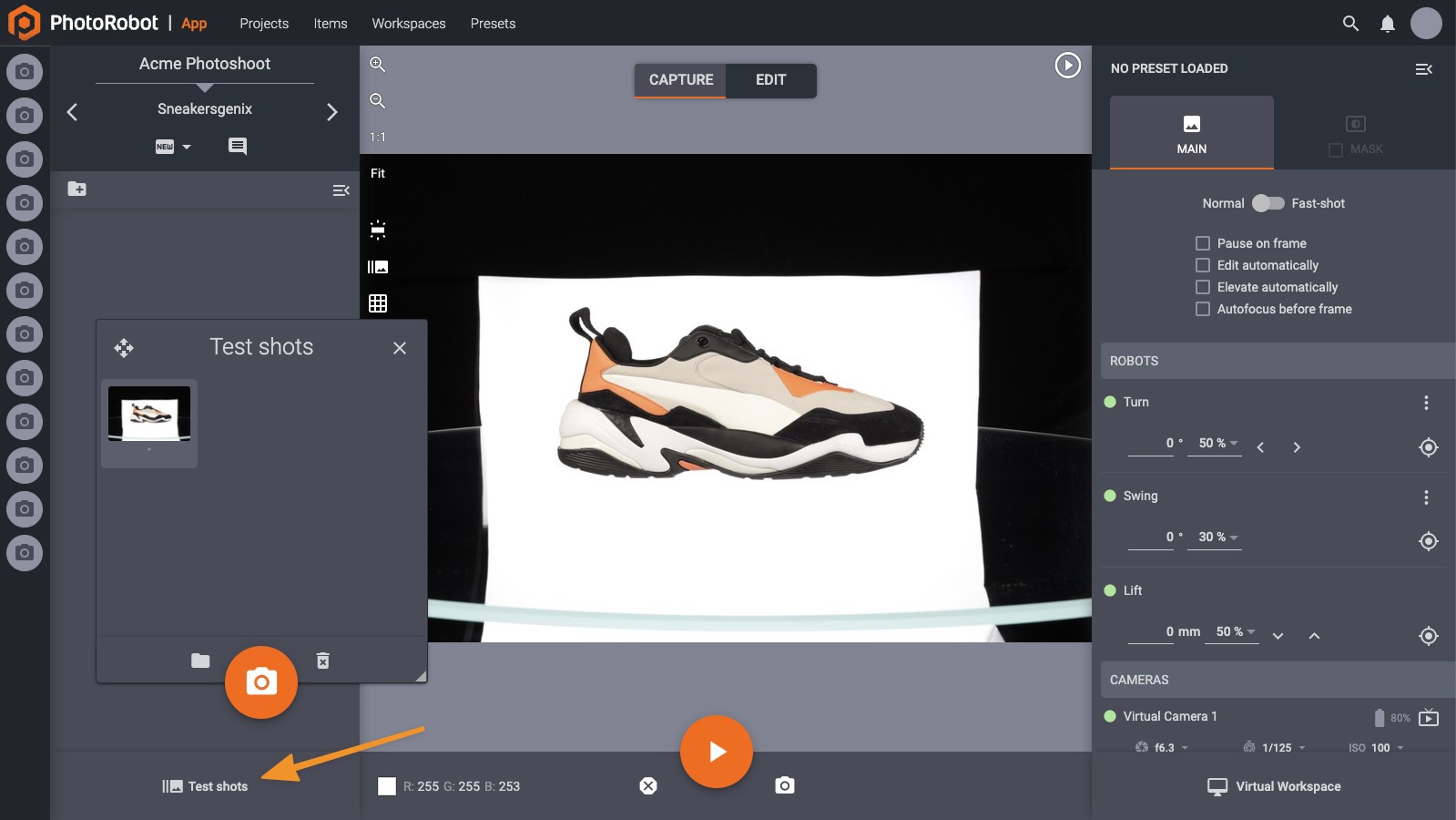
Tirando fotos de teste
Antes de tirar as imagens finais, é uma boa ideia tirar uma ou mais fotos de teste. A maneira mais fácil de fazer isso é pressionando a tecla T no teclado do computador. Isso vai ajudá-lo a verificar se você deve alterar as configurações de suas luzes, câmera, etc. As imagens de teste são armazenadas na pasta "test shot", que você pode acessar na parte inferior esquerda da tela.
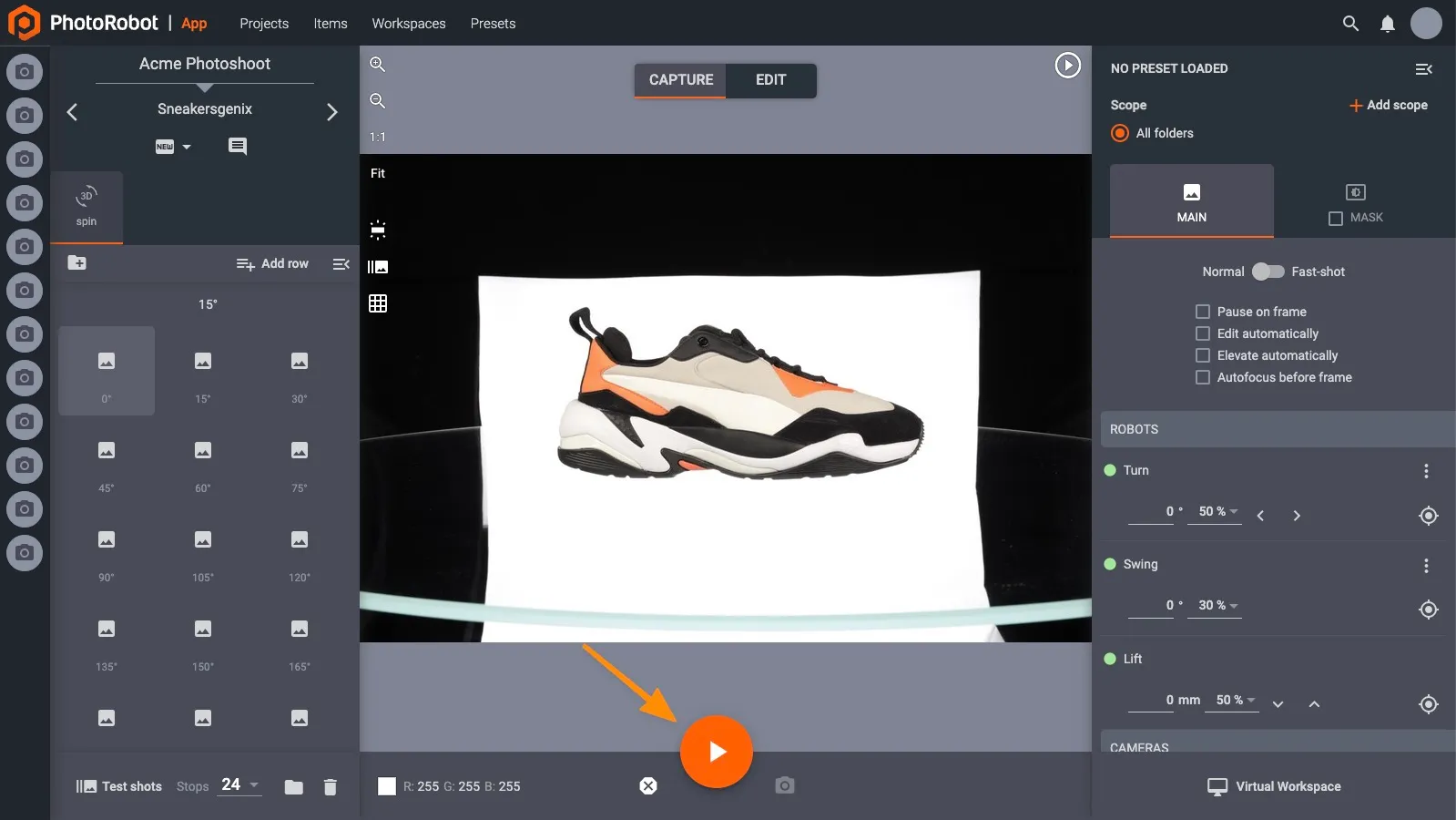
Iniciando uma sequência de fotografia
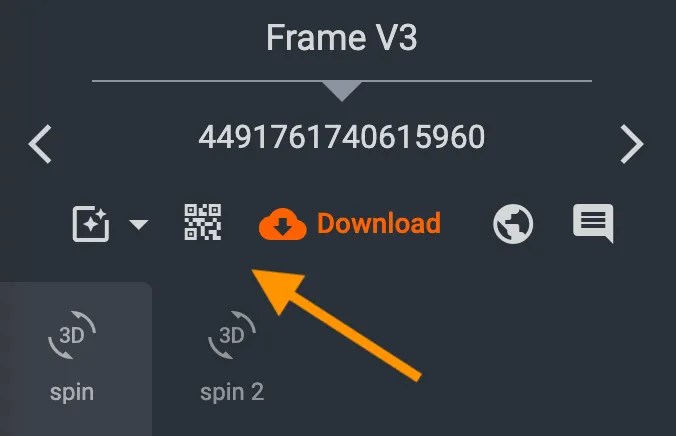
Quando satisfeitos com as configurações, que foram verificadas ao tirar uma foto de teste, é hora de executar a sequência de fotografia. Isso pode ser acionado pressionando a barra de espaço no teclado ou clicando no botão "iniciar" mostrado na imagem abaixo.
Se você tiver um leitor de código de barras, também poderá acionar a sequência digitalizando um código de barras "inicial" especial. Baixe o código de barras "iniciar" do PhotoRobot online e imprima-o para usar esse recurso.

Você saberá que a sequência terminou com sucesso se todas as miniaturas do lado esquerdo foram preenchidas com imagens. É uma boa prática prestar atenção a eventuais erros nas luzes estroboscópicas.
Se alguma das miniaturas estiver mais escura em comparação com as outras, diminua a velocidade de rotação ou, se necessário, verifique a condição de suas luzes. Você pode então marcar essas imagens e refilmá-las sem ter que executar toda a sequência novamente.
Uma vez que a sequência de captura esteja concluída, você pode mudar para editar o modo, que é onde você executará o pós-processamento.
Macros PhotoRobot
As macros no CAPP permitem que os usuários definam comandos para o processo de captura de um item e suas pastas (spin, stills, etc). Os comandos podem ser aplicados a pastas individuais ou múltiplas, executar sequências, edições de imagem, espaços de trabalho, predefinições, copiar configurações de imagem e mover configurações de imagem. Os usuários também podem personalizar macros por nome, código de barras, tag ou notas.
Nota: Para instruções detalhadas sobre a configuração e uso de PhotoRobot Macros, consulte o Guia do Usuário de PhotoRobot Macros. Descubra como as macros permitem a magia da automação fotográfica em várias pastas e componentes, com o processamento automático de tarefas complexas.
Modo PhotoRobot Wizards
O modo Assistentes no CAPP funciona como uma alternativa à configuração manual de hardware, câmera e sequência. Em uso, o modo Assistentes permite que um administrador ou fotógrafo crie diferentes Assistentes para simplificar o modo de captura para operadores de linha de produção. Um operador pode então iniciar o CAPP no modo Assistentes, que funciona como uma interface extremamente simples com etapas guiadas por assistente. Existem também controles limitados para facilidade de uso e integração.
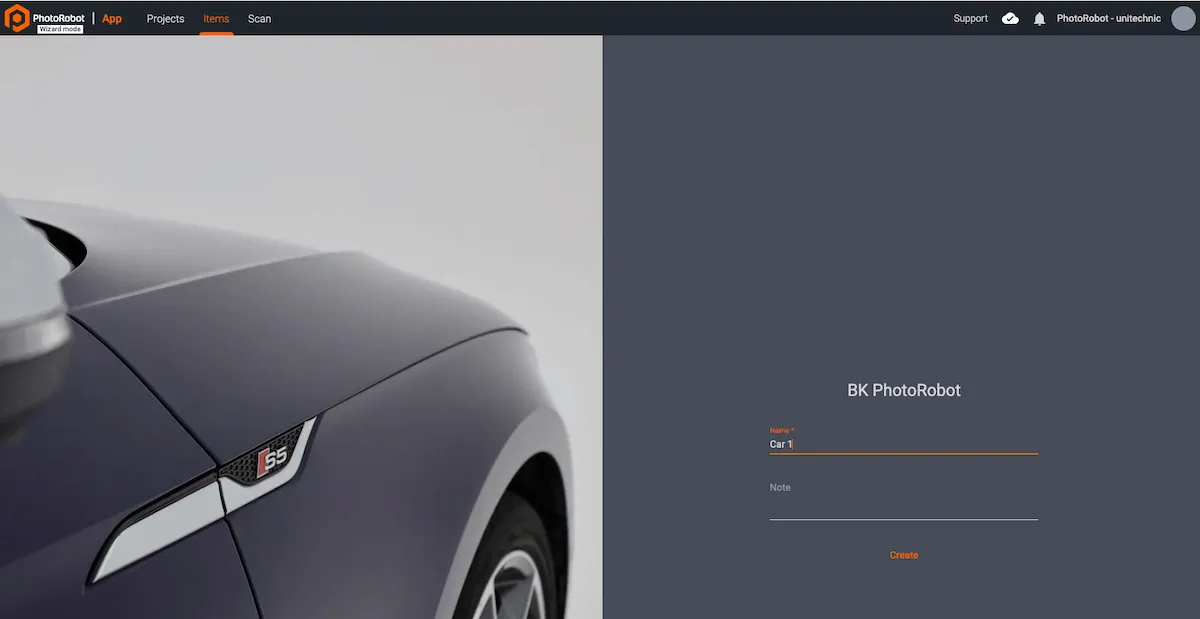
Após criar um assistente, ele armazena Predefinições e configurações de Espaço de Trabalho, bem como passos predefinidos que os operadores devem seguir. Os operadores não podem ajustar nenhuma configuração e devem completar as instruções em cada passo antes de poderem avançar para o próximo processo.
Nota: As etapas do assistente são definidas em um formato de linguagem semelhante ao JavaScript e roteirizadas por consultores PhotoRobot para funcionalidade personalizada. Os usuários também podem roteirizar funções básicas para experimentos iniciais ou configurações simples. Para documentação sobre a configuração técnica e uso do assistente pelo operador, consulte o Manual do Usuário do Modo Assistente PhotoRobot.
Editar interface de modo
No lado direito da tela, você pode adicionar qualquer número de operações de edição:
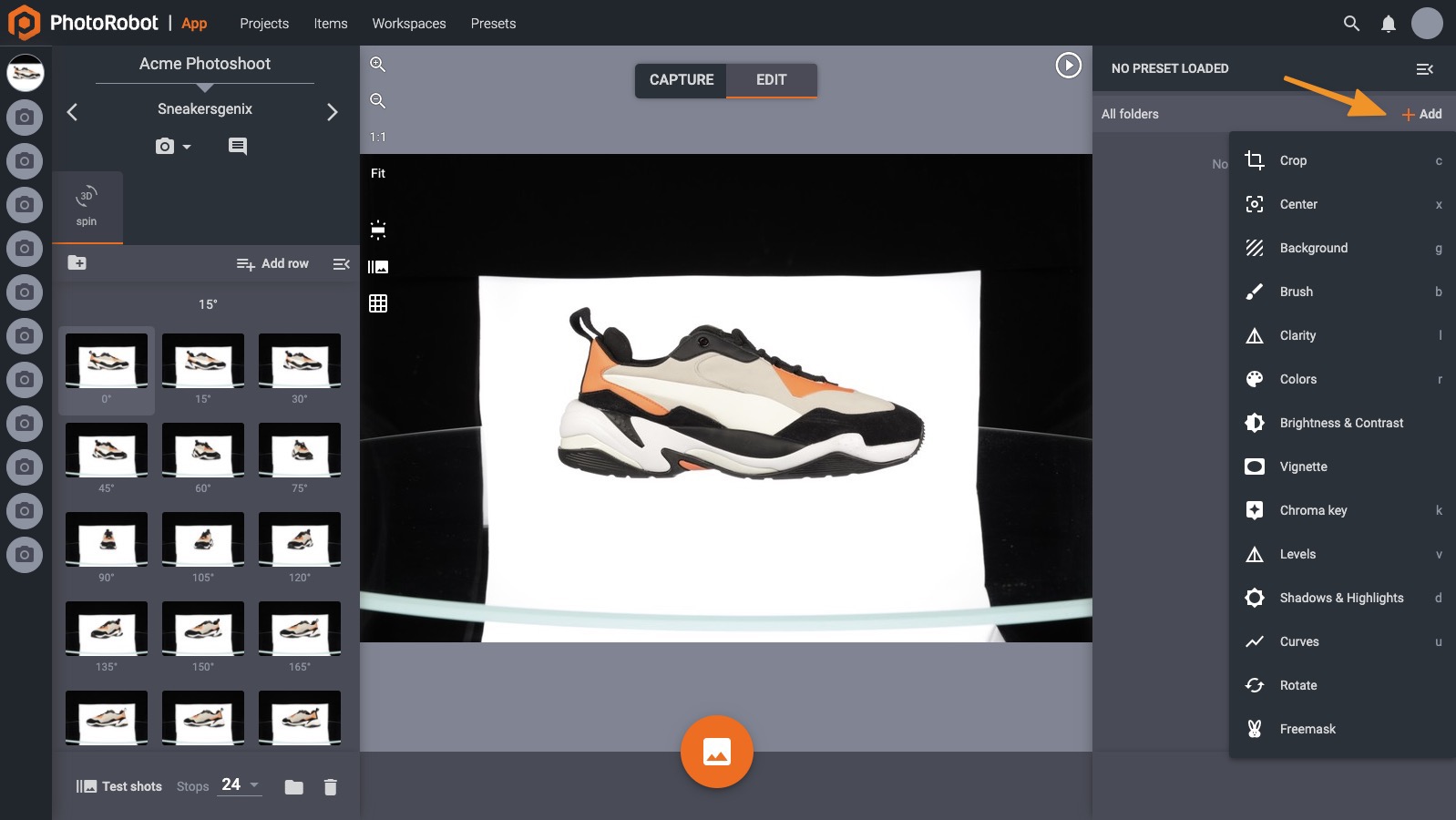
Algumas das operações de edição mais comuns estão listadas no topo: cultura, centro e fundo.
Safra Automática
Crop - ao cortar imagens, há três controles principais: os alternadores para corte automático, proporção e preenchimento (que controla quanto espaço há ao redor do objeto fotografado).

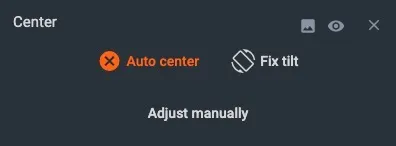
Auto Center
Centro - embora a maioria das máquinas PhotoRobot estejam equipadas com lasers que ajudam no posicionamento de objetos na superfície, a maioria das imagens precisará de um centro de software adicional. Isso é especialmente importante para giros de 360°. Ao começar, recomenda-se manter a função "auto center", como visto na imagem abaixo:
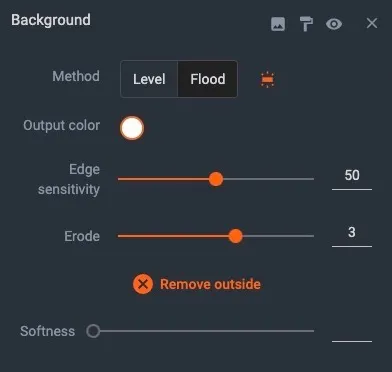
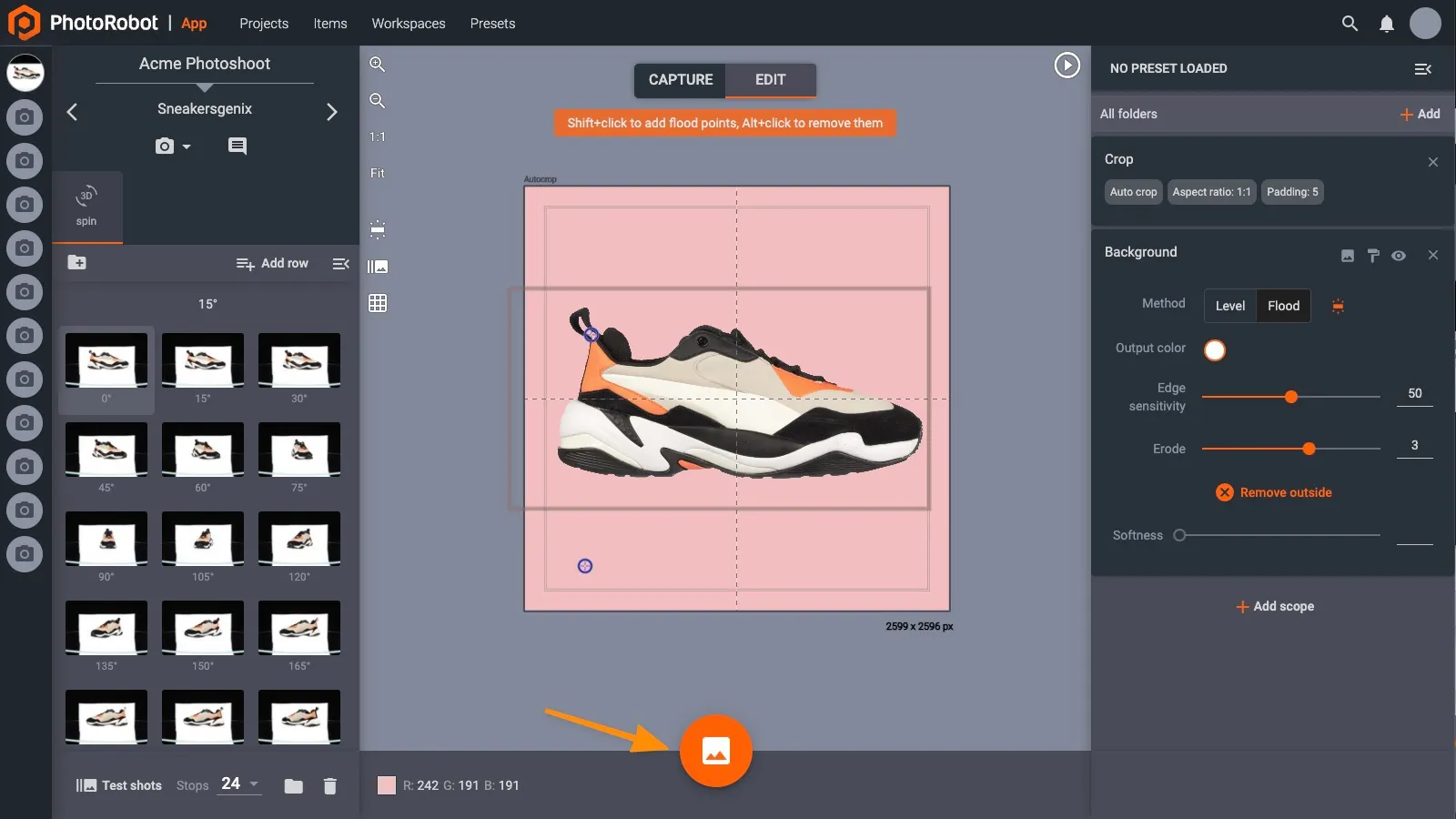
Remoção de fundo
A operação Background ajustará o plano de fundo de uma imagem ou conjunto de imagens, removendo completamente o plano de fundo, se desejado. Diferentes resultados podem ser alcançados pelos três métodos diferentes de remoção de fundo no CAPP. Há remoção de fundo por nível, remoção de fundo por inundação e por mascaramento livre.
- A remoção de plano de fundo por nível usa a análise de software dos níveis de cor RGB e valores de brilho para identificar o plano de fundo e o primeiro plano. Isso é vantajoso ao fotografar itens brilhantes ou brancos e ao usar um fundo branco. Ajuste os níveis no software para aumentar o brilho do plano de fundo até que se torne branco puro. É então possível tornar o fundo transparente ou trocar por fundos de cores diferentes.
- A remoção de fundo por inundação funciona por princípios semelhantes à remoção de fundo por nível e é mais frequentemente útil ao fotografar itens mais escuros. A remoção do plano de fundo pela operação de inundação torna o brilho do plano de fundo mais intenso até que se torne branco puro ao redor do item. No entanto, em vez de ajustar os níveis, a ferramenta usa um ponto selecionado para identificar o plano de fundo e, em seguida, "inunda" essa área. Os usuários simplesmente clicam em um ponto fora do objeto fotografado. O software então detecta as bordas do objeto e aplica inundações para preencher o espaço disponível ao seu redor.
- A remoção de plano de fundo de mascaramento livre requer mais configuração do que usar níveis ou inundação, mas pode ser um dos métodos mais precisos e rápidos. Este método usa uma imagem de máscara recortada e uma imagem principal do produto, compondo as duas imagens para remover o fundo. Às vezes, essa é a única maneira eficiente de remover o fundo em torno de objetos mais "difíceis". Tomemos, por exemplo, itens reflexivos ou objetos que contêm áreas com espaço vazio. O freemasking identifica o objeto em relação a todo o espaço vazio, enquanto remove o plano de fundo ao redor do item e dentro dele, se necessário. No entanto, o método requer configuração adicional de luzes de estúdio para criar as imagens principais e de máscara para remoção de fundo.
Nota: Lembre-se de que se o CAPP será ou não capaz de remover o fundo depende principalmente de como a cena é iluminada. Se você não conseguir encontrar configurações que funcionem de forma satisfatória, refaça as imagens com diferentes configurações de luz.
Quando estiver satisfeito com as configurações de edição, aplique os parâmetros clicando no botão "aplicar", localizado onde anteriormente o botão "iniciar" apareceu.
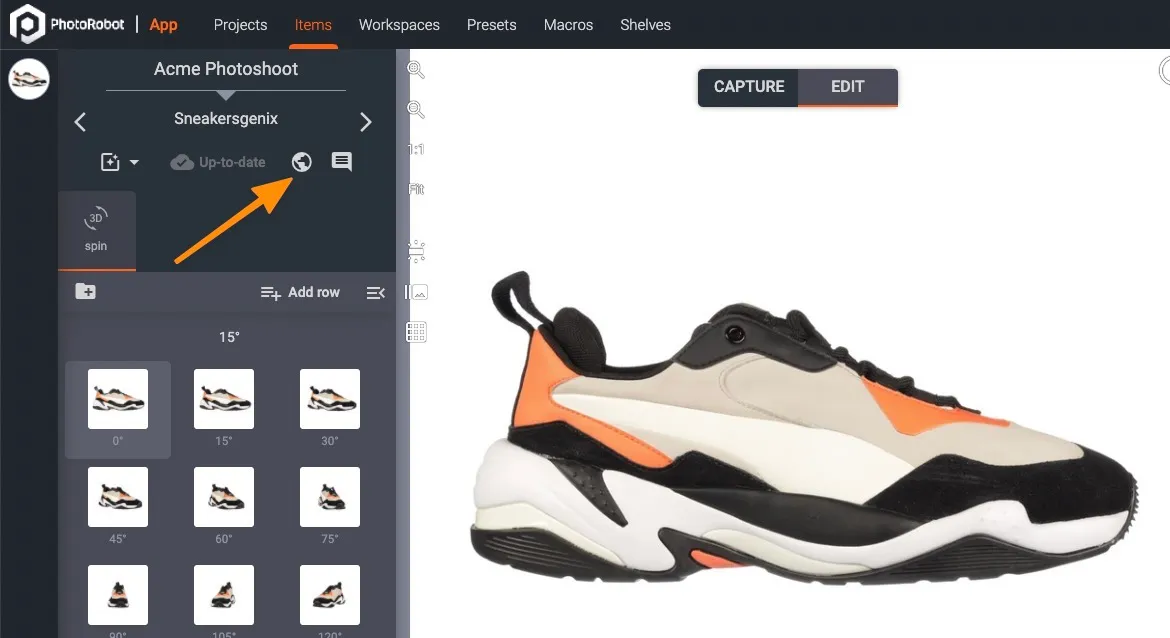
Publicando imagens
Uma vez que a barra de progresso chegue ao fim, suas edições foram aplicadas com sucesso às suas imagens. Se você estiver usando capp sem PhotoRobot serviços de nuvem, suas imagens resultantes são armazenadas em uma estrutura de pasta em sua unidade local.
Se usar PhotoRobot hospedagem em Nuvem, os arquivos também podem ser encontrados no armazenamento em nuvem PhotoRobot. Para acessá-los, clique em Abrir na nuvem na seção Fotos na parte superior esquerda da tela.
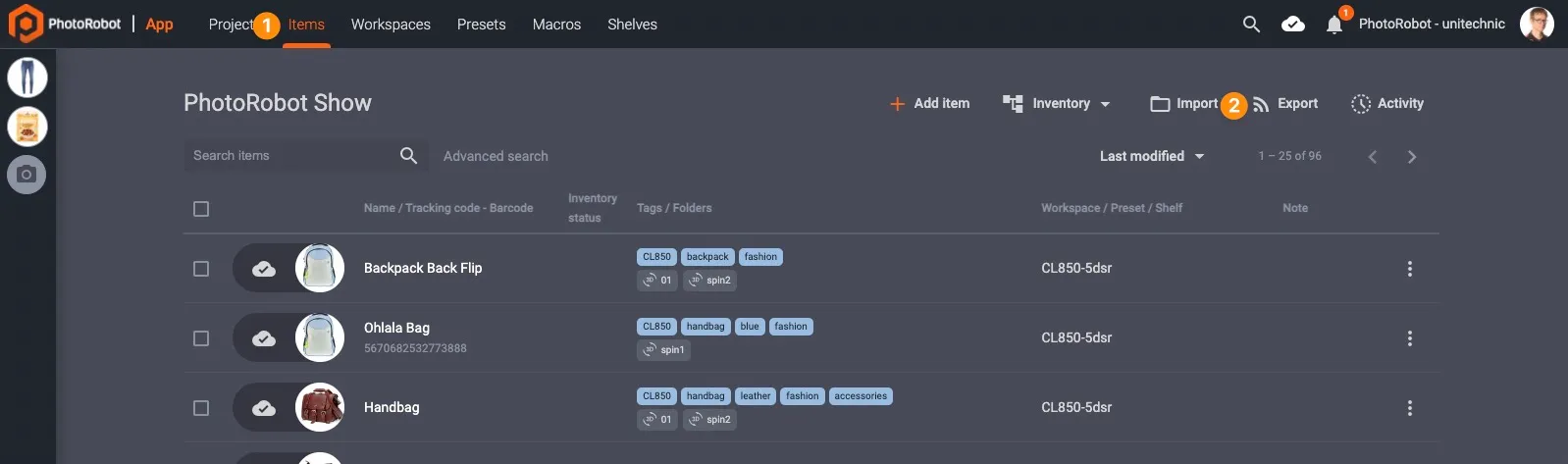
Exportando imagens
Para exportar um item do CAPP, os usuários podem exportar para um disco local ou exportar para o PhotoRobot Cloud. A exportação de itens possibilita definir itens com convenções de nomenclatura personalizadas, especificar formato de imagem, resolução e várias variáveis de modelo de nome de arquivo.
Para acessar as configurações de exportação de item, vá para a seção Itens e clique em Exportar no menu acima da lista de itens:
A seguinte janela será aberta, permitindo que você altere as configurações de exportação:
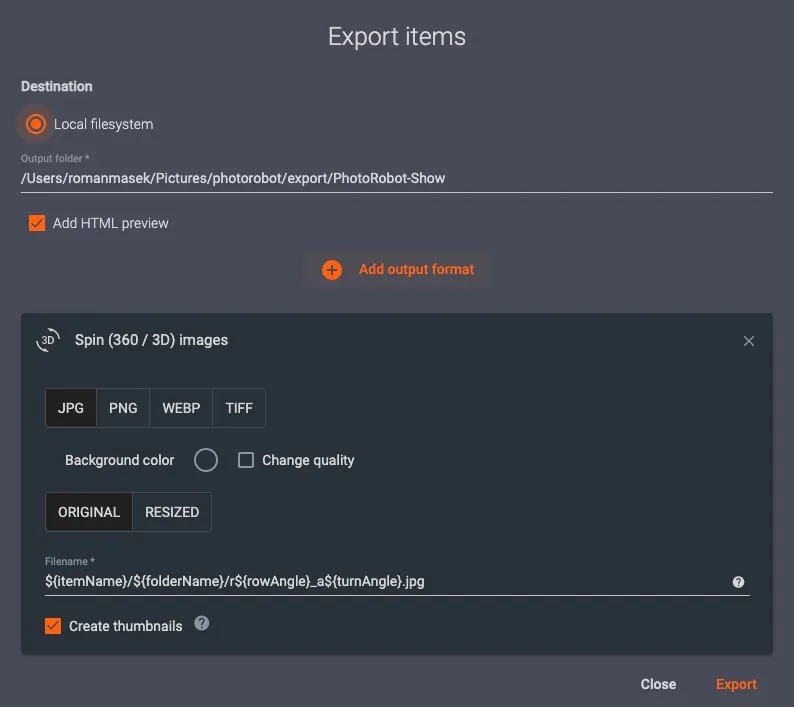
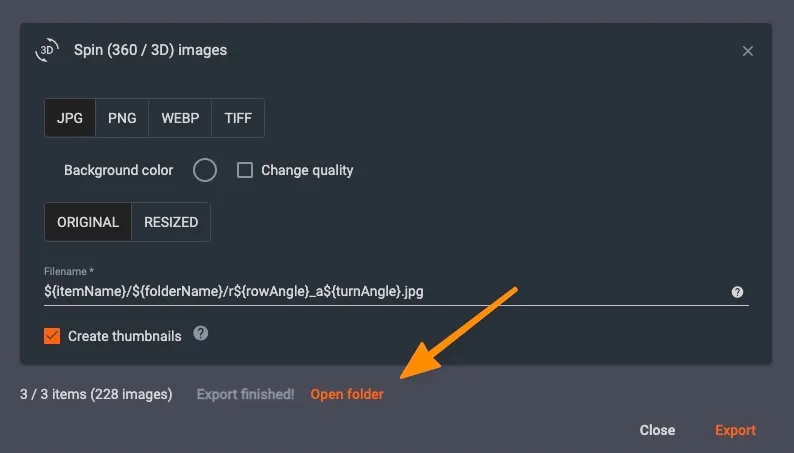
Execute o processo de exportação clicando no botão Exportar no canto inferior direito desta janela.
Quando a barra de progresso de exportação chegar ao fim, você pode clicar em Abrir pasta para acessar suas imagens exportadas.
Publique via Cloud
Se publicar via PhotoRobot serviços cloud, primeiro abra o item na nuvem. A interface exibe a imagem capturada. Clique no botão Códigos & Links:
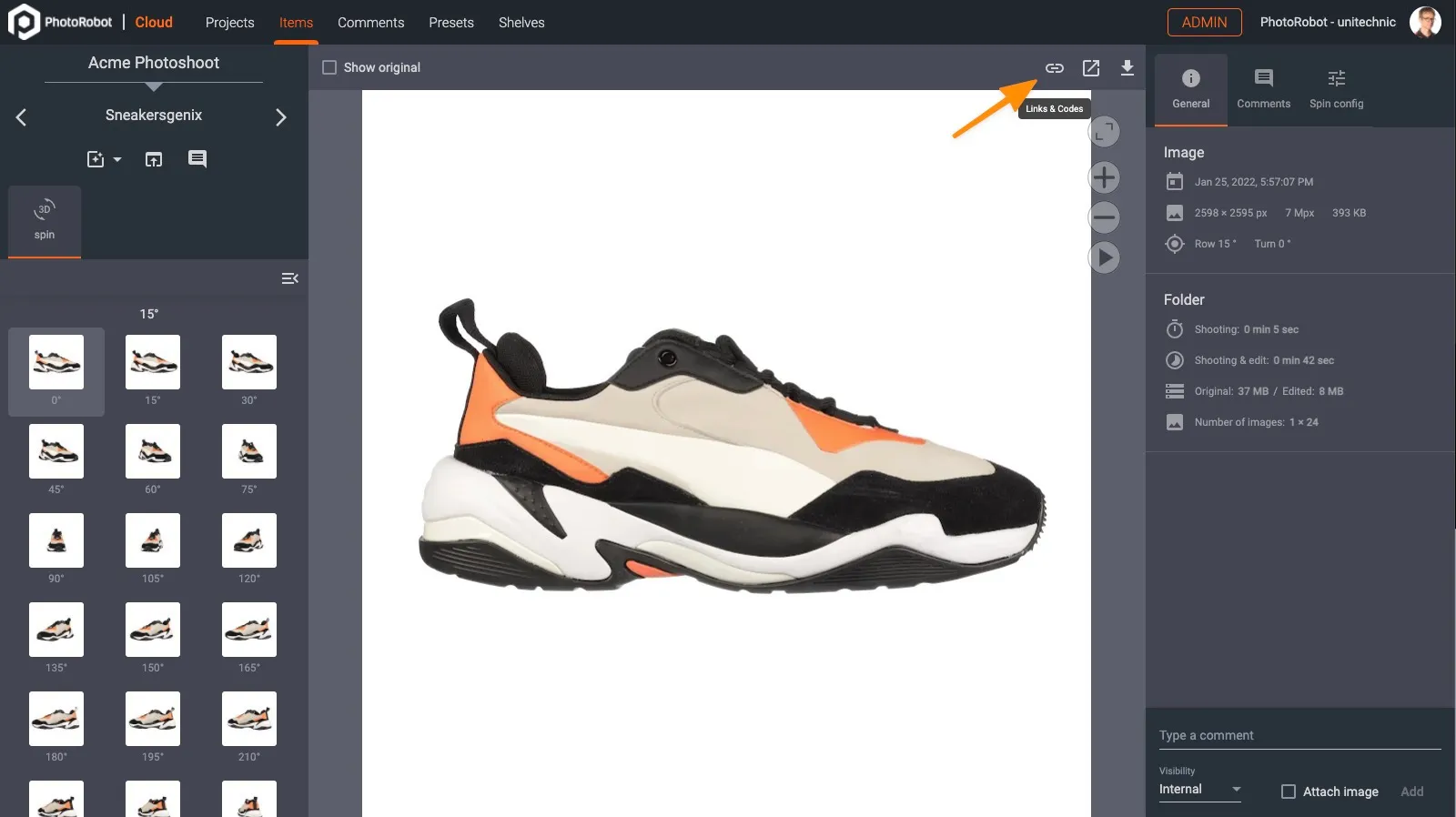
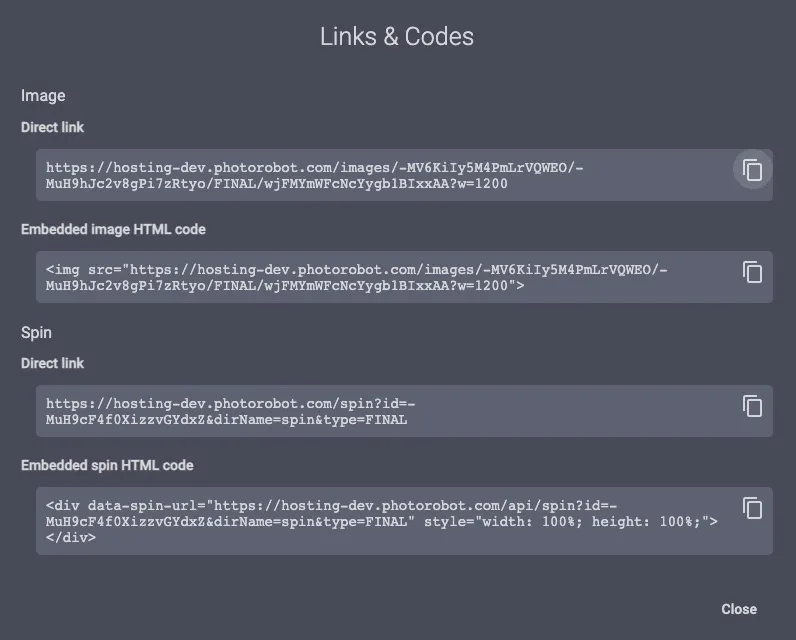
Copie o link direto e cole-o no seu navegador para visualizar a imagem ou girar. Se estiver satisfeito, copie o código HTML de spin incorporado . Cole esse código na sua página para incorporar o spin para exibição.


Série EOS Rebel


Série EOS DSLR


Série EOS M Mirrorless


Série PowerShot


Close-Up / Portátil

A série Canon EOS Rebel oferece câmeras DSLR amigáveis para iniciantes com qualidade de imagem sólida, controles intuitivos e recursos versáteis. Ideais para entusiastas da fotografia, essas câmeras oferecem foco automático confiável, telas sensíveis ao toque de ângulo variável e gravação de vídeo Full HD ou 4K.
Conexão
Resolução (MP)
Resolução
A série Canon EOS DSLR oferece imagens de alta qualidade, foco automático rápido e versatilidade, tornando-a ideal para fotografia e produção de vídeo.
Conexão
Resolução (MP)
Resolução
A série Canon EOS M Mirrorless combina design compacto com desempenho semelhante ao de uma DSLR. Com lentes intercambiáveis, foco automático rápido e sensores de imagem de alta qualidade, essas câmeras são ótimas para viajantes e criadores de conteúdo que buscam portabilidade sem sacrificar a qualidade da imagem.
Conexão
Resolução (MP)
Resolução
A série Canon PowerShot oferece câmeras compactas e fáceis de usar para fotógrafos casuais e entusiastas. Com modelos que variam de simples point-and-shoots a câmeras de zoom avançadas, eles oferecem conveniência, qualidade de imagem sólida e recursos como estabilização de imagem e vídeo 4K.
Conexão
Resolução (MP)
Resolução
As câmeras Canon Close-Up & Handheld são projetadas para fotografia e vídeo detalhados e próximos. Compactas e fáceis de usar, elas oferecem foco preciso, imagens de alta resolução e recursos macro versáteis, perfeitas para vlogs, fotografia de produtos e close-ups criativos.


