Guia de Centralização e Alinhamento a Laser PhotoRobot
Este manual de suporte ao usuário fornece instruções técnicas sobre como alinhar e centralizar os sistemas de laser cruzado integrados PhotoRobot. Siga estas etapas para encontrar o ponto médio de qualquer placa redonda do PhotoRobot usando dois lasers. As instruções incluem como mover fisicamente os lasers para o centro da mesa, configurações iniciais do laser e como ajustar o posicionamento do laser. Além disso, no final do manual, há instruções para alinhar e centralizar o sistema de laser especial da mesa giratória C1300 (anteriormente distribuída sob o nome Case 1300).
Importante: Sempre consulte primeiro as informações e instruções de segurança do PhotoRobot, além do manual fornecido especificamente com o seu dispositivo antes de qualquer autoinstalação ou serviço.
Nota: Consulte PhotoRobot First Use & Basic Testing para obter informações detalhadas sobre a configuração da rede e os requisitos da rede.
1. Mova fisicamente os lasers para o centro da mesa
1.1. Antes de começar, estabeleça uma conexão entre o PhotoRobot e a rede local. Em seguida, ligue a Unidade de Controle (6ª Geração) e uma caixa de laser.
Nota: Para alinhar e centralizar o sistema de laser para o toca-discos C1300, consulte também as instruções especiais na seção 4 deste manual do usuário.
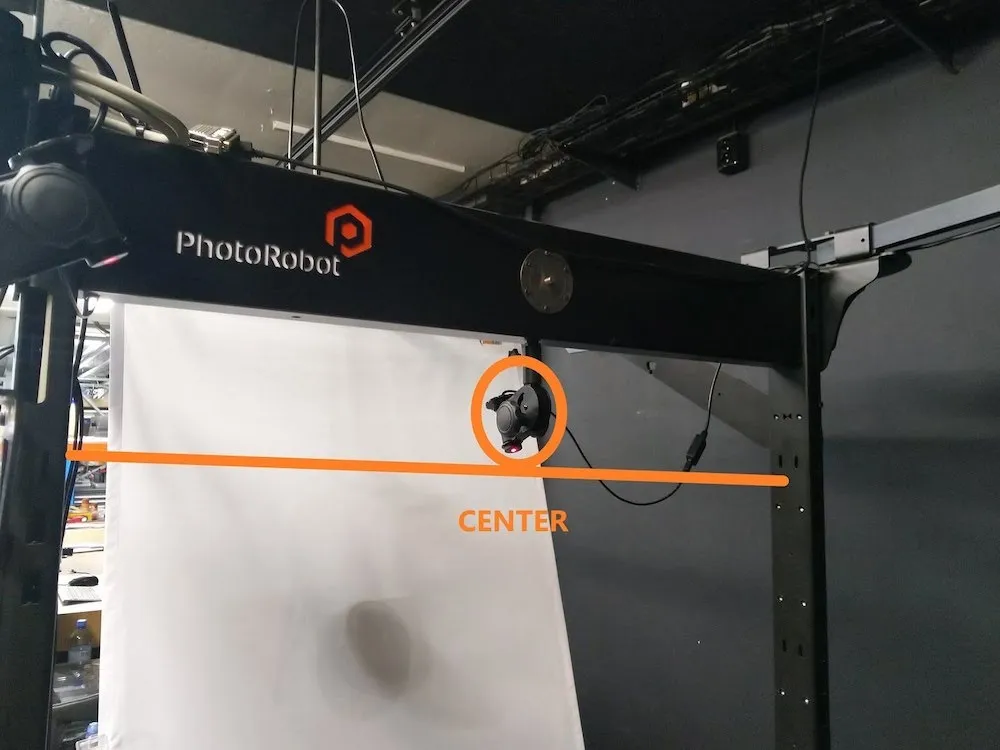
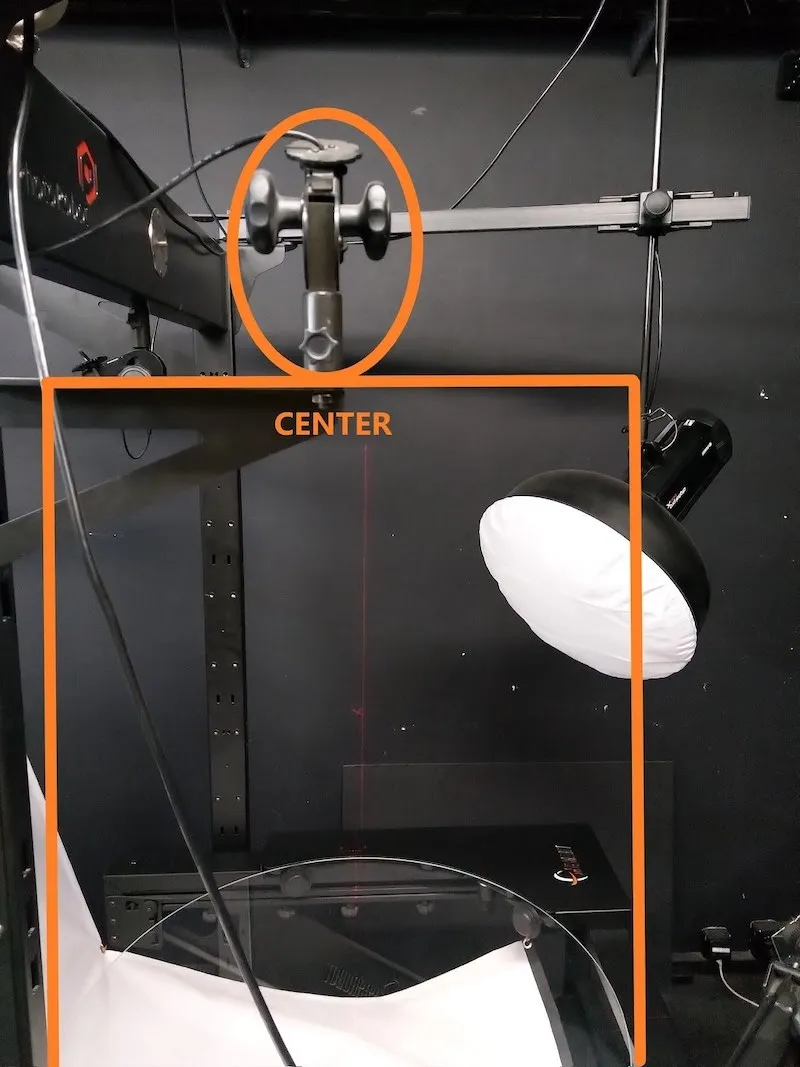
1.2. Depois de conectar o PhotoRobot à rede e ligar a Unidade de Controle e a caixa do laser, meça a distância entre os dois lados da mesa onde o laser está montado. Em seguida, gire ou mova o laser manualmente para o centro e prenda o laser na posição.
2. Estime as configurações aproximadas
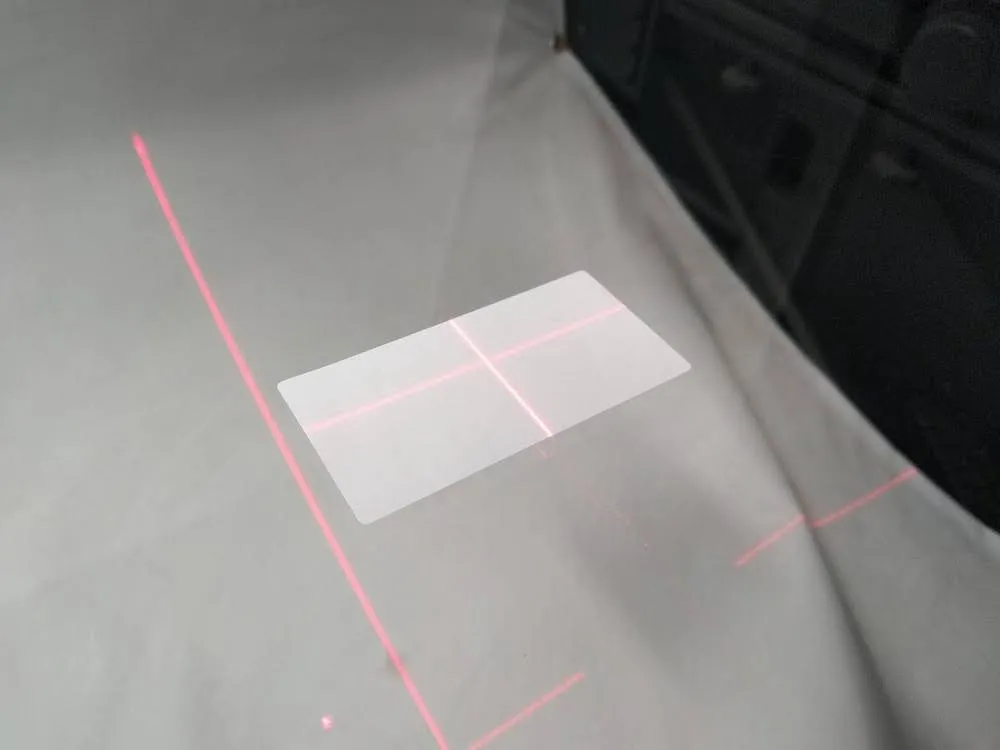
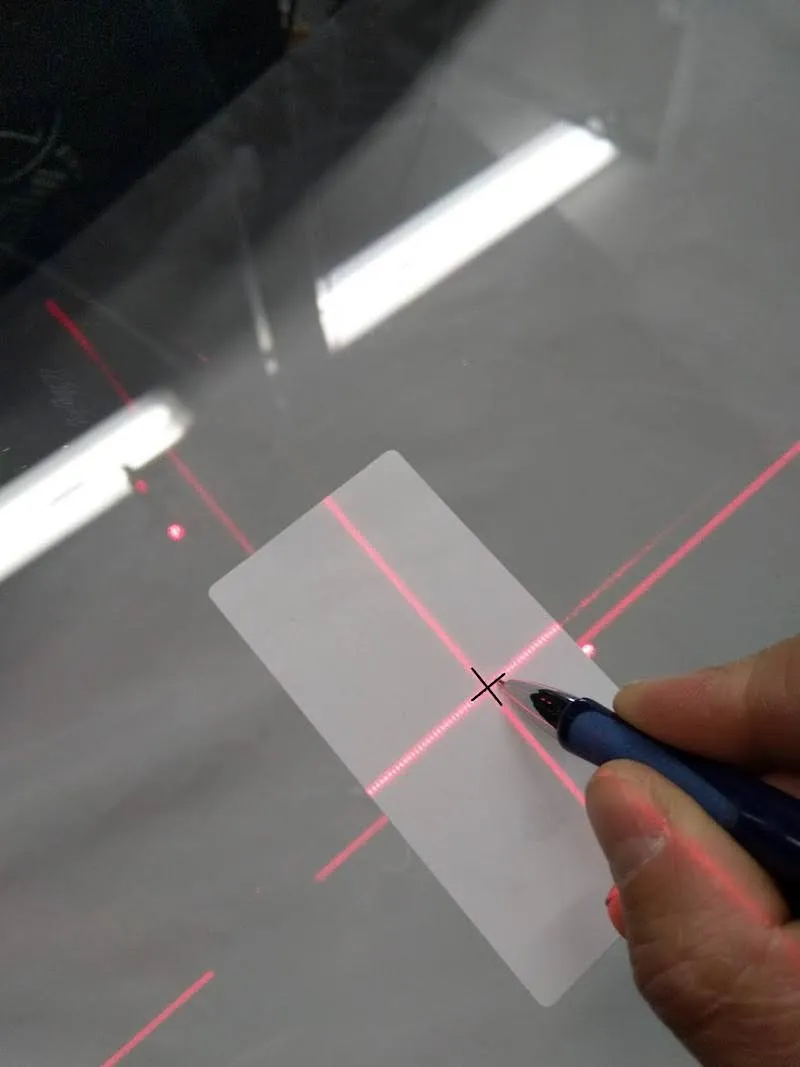
2.1. Quando o laser estiver fixado na posição, coloque um adesivo na placa do prato giratório no ponto médio aproximado do vidro. Os lasers ficarão mais visíveis no adesivo, ajudando a estimar melhor o ponto central da placa.
2.2. Ajuste os dois lasers manualmente para alinhar no adesivo que estima o ponto médio aproximado.
3. Ajuste o alinhamento do laser
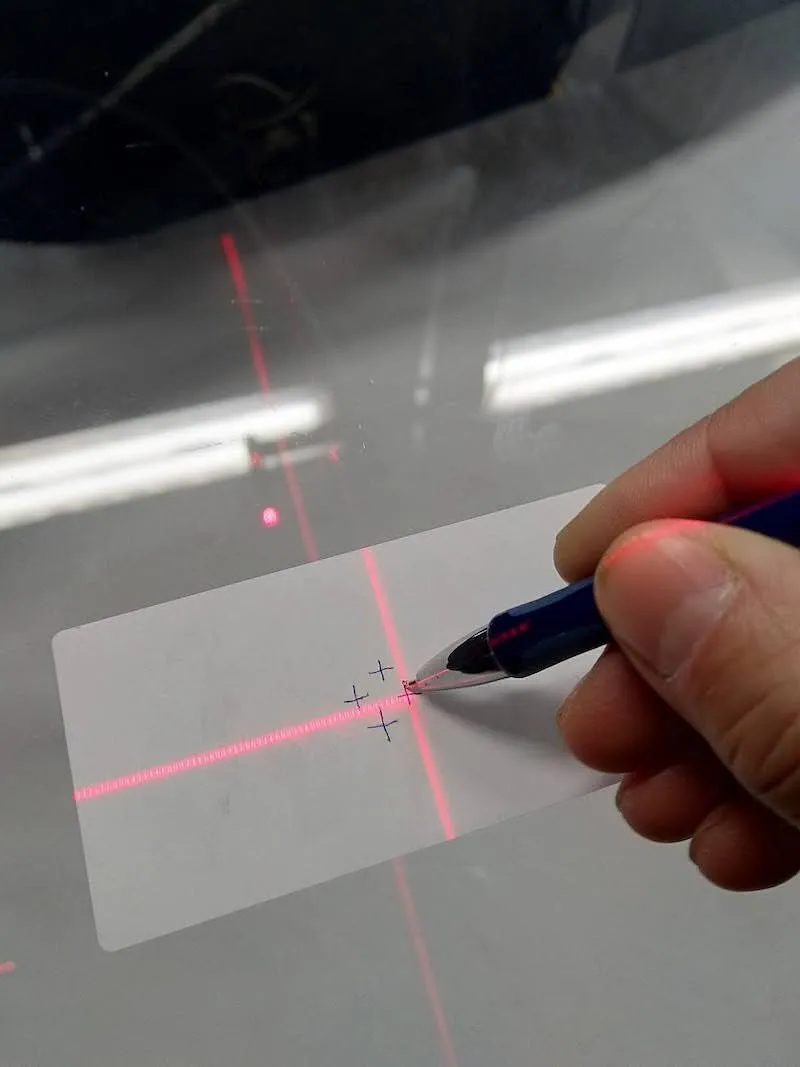
3.1. Trace uma pequena cruz no adesivo copiando a cruz vermelha dos lasers.
3.2. Em seguida, inicie o aplicativo Localizador em seu celular, encontre a Unidade de Controle atribuída ao robô e acesse a GUI de serviço. Nota: Para obter instruções detalhadas sobre rede, consulte Pré-requisitos detalhados de rede do PhotoRobot (seção 8: Informações do apêndice). Em seguida, encontre a Unidade de Controle atribuída ao robô e acesse sua GUI.

3.3. Na GUI de serviço, use os controles de giro para girar o vidro 90 graus e trace a posição dos lasers cruzados no adesivo novamente. Repita esta etapa duas vezes: girando o vidro 90 graus, traçando a cruz do laser, girando 90 graus e traçando a cruz do laser uma última vez.
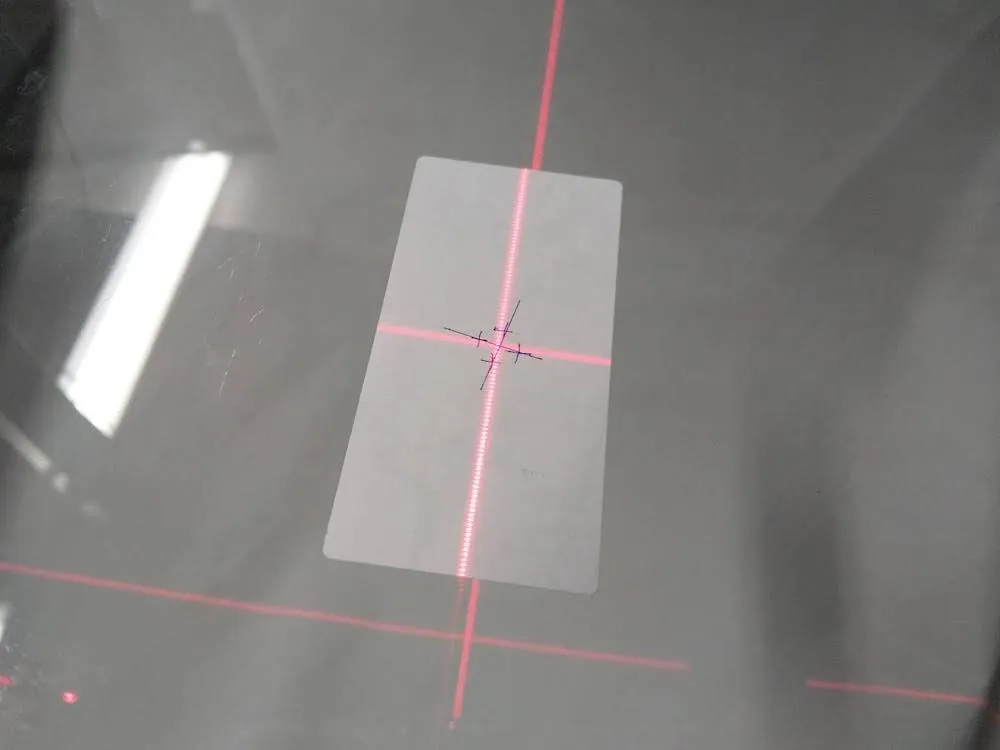
3.4. Depois de traçar as quatro cruzes no adesivo, conecte cada cruz oposta por linhas retas. O cruzamento resultante entre as cruzes individuais representará o ponto médio real da placa de vidro.
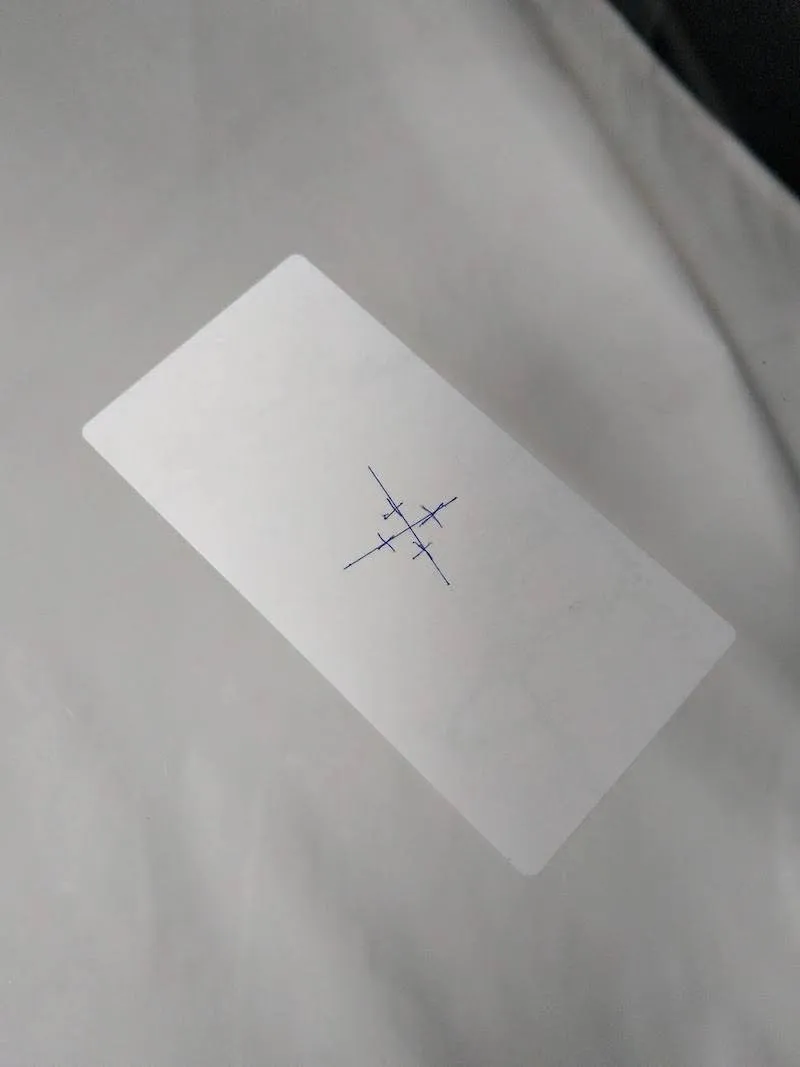
3.5. Por fim, ajuste os dois lasers para o ponto médio identificado. O sistema de laser agora será centralizado e alinhado ao centro absoluto de rotação da placa.
4. Alinhamento e centralização de lasers especiais C1300
4.1. Ao alinhar e centralizar os lasers no robô C1300, observe o sistema de laser especial. O sistema laser C1300 tem várias diferenças em comparação com outros PhotoRobots. Embora os princípios físicos sejam os mesmos, a construção do sistema laser C1300 apresenta uma instalação de quatro lasers.
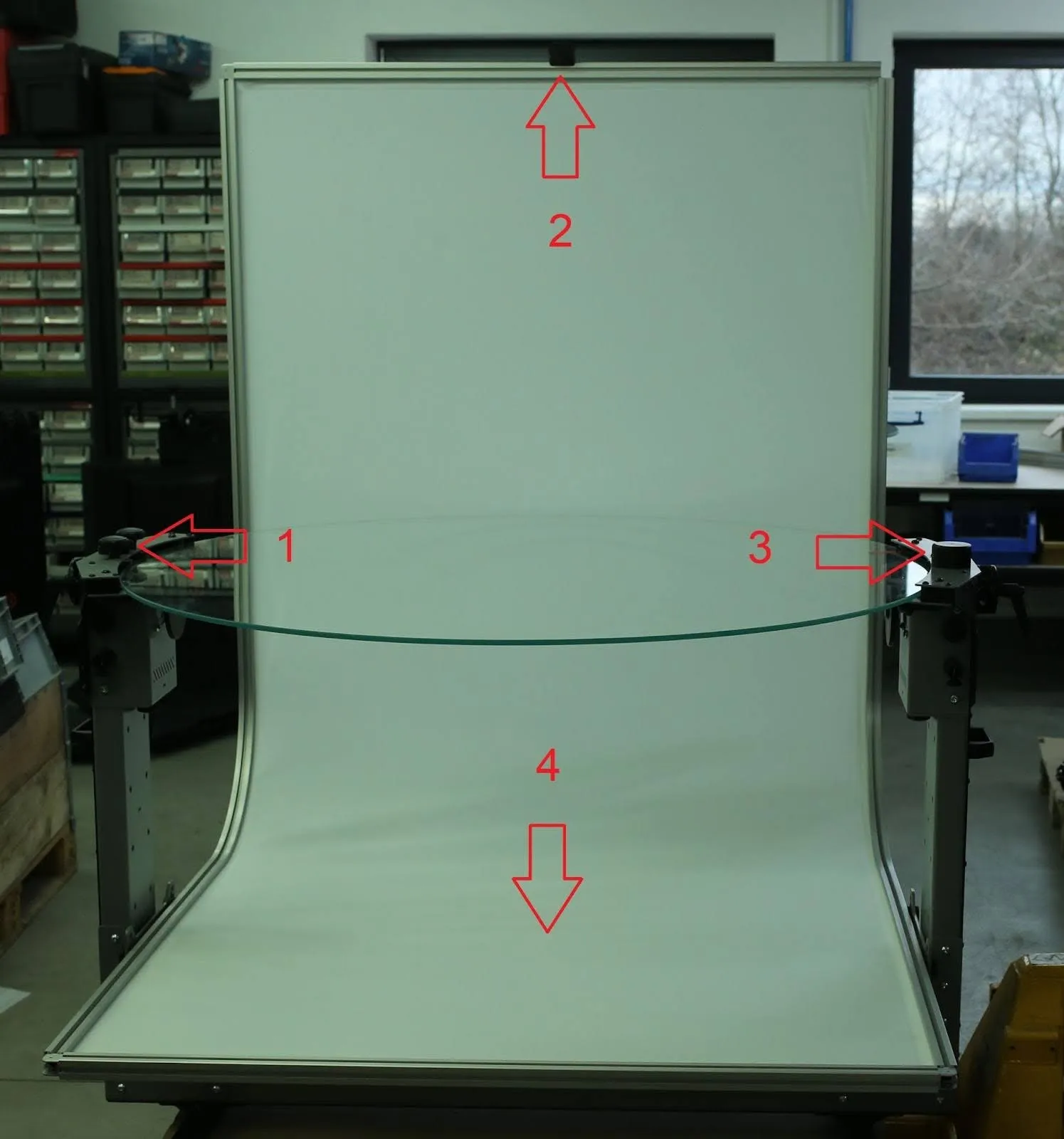
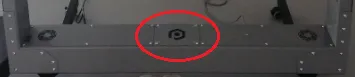
4.2. Neste sistema, o Laser 4 é parte integrante do esqueleto do robô C1300. O Laser 4 é um laser cruzado e brilha através do fundo branco na parte inferior. Para ajustar a posição do laser, encontre os quatro parafusos prateados para descobrir a parte quadrada central que abriga o laser.
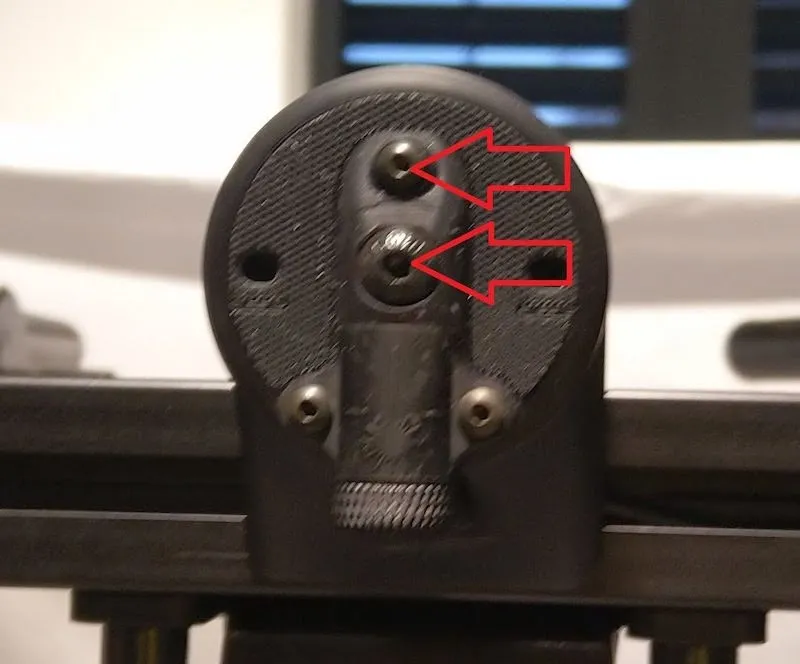
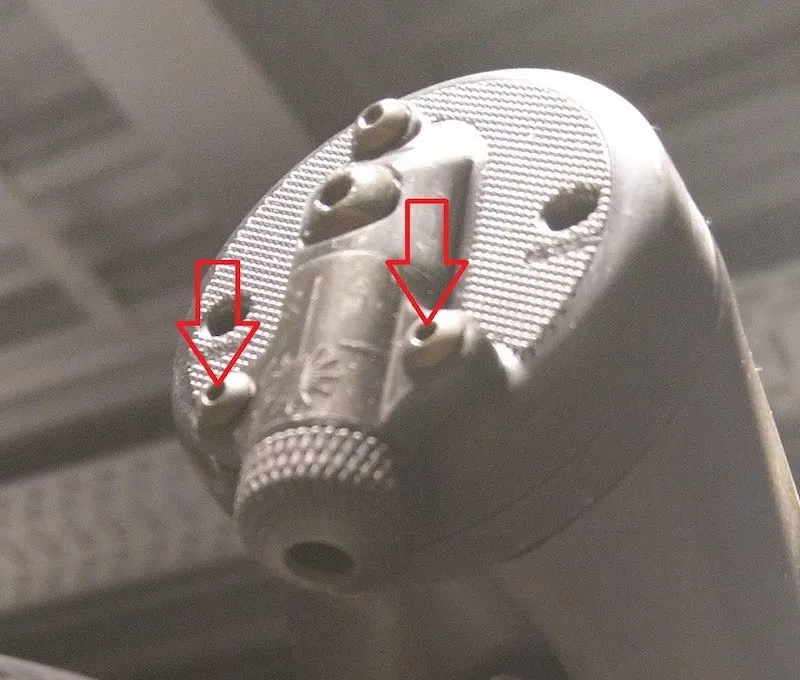
4.3. Depois de descobrir a caixa da parte quadrada central Laser 4, use os dois parafusos que prendem a caixa plástica do laser para ajustar sua posição manualmente.
Nota: O Laser 1, o Laser 2 e o Laser 3 têm a mesma construção do Laser 4. Eles também são todos lasers de linha:



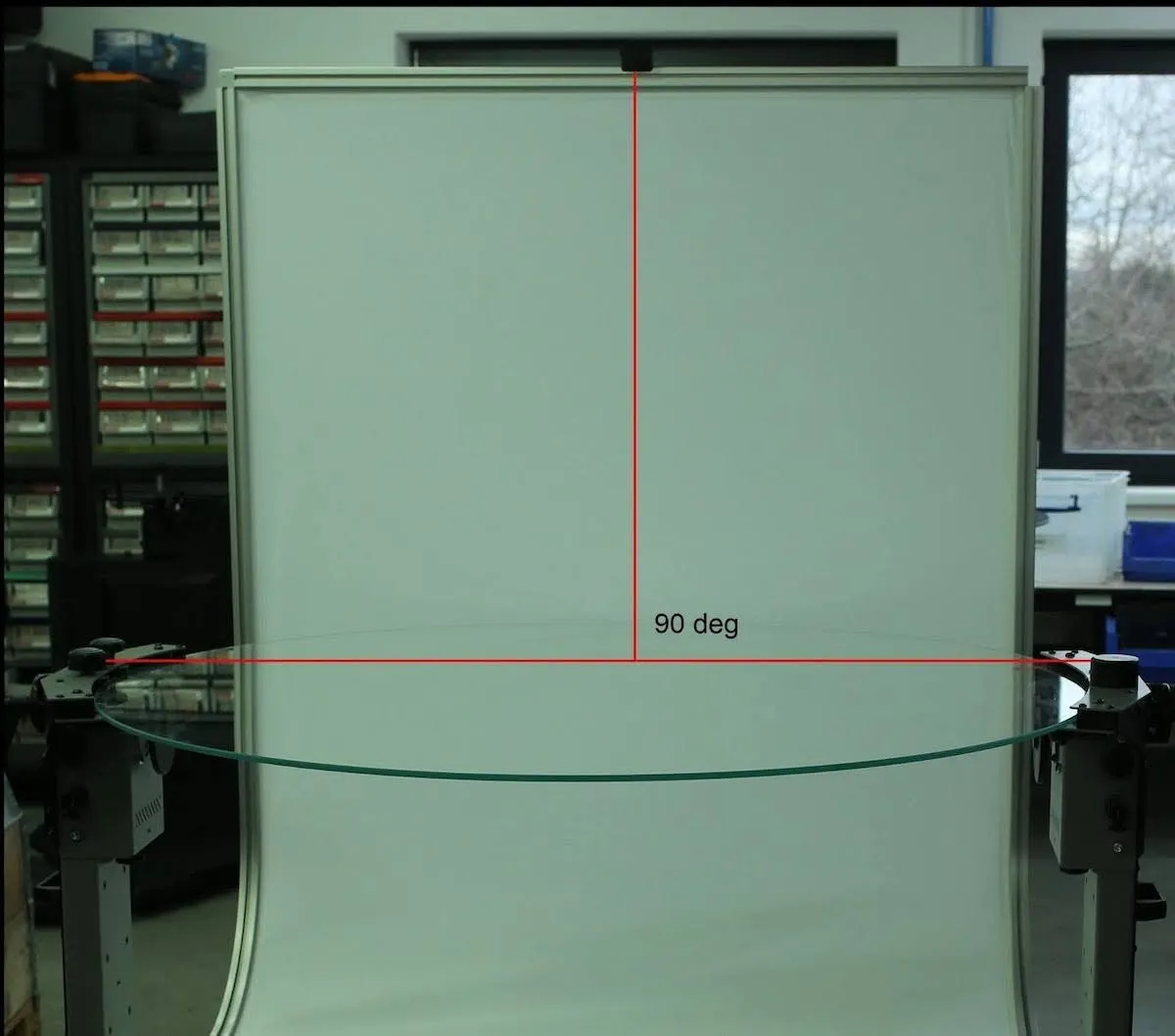
4.4. Finalmente, ao alinhar e centralizar os lasers, certifique-se de que haja um ângulo de 90 graus entre a linha do laser do laser superior e a placa de vidro.


Série EOS Rebel


Série EOS DSLR


Série EOS M Mirrorless


Série PowerShot


Close-Up / Portátil

A série Canon EOS Rebel oferece câmeras DSLR amigáveis para iniciantes com qualidade de imagem sólida, controles intuitivos e recursos versáteis. Ideais para entusiastas da fotografia, essas câmeras oferecem foco automático confiável, telas sensíveis ao toque de ângulo variável e gravação de vídeo Full HD ou 4K.
Conexão
Resolução (MP)
Resolução
A série Canon EOS DSLR oferece imagens de alta qualidade, foco automático rápido e versatilidade, tornando-a ideal para fotografia e produção de vídeo.
Conexão
Resolução (MP)
Resolução
A série Canon EOS M Mirrorless combina design compacto com desempenho semelhante ao de uma DSLR. Com lentes intercambiáveis, foco automático rápido e sensores de imagem de alta qualidade, essas câmeras são ótimas para viajantes e criadores de conteúdo que buscam portabilidade sem sacrificar a qualidade da imagem.
Conexão
Resolução (MP)
Resolução
A série Canon PowerShot oferece câmeras compactas e fáceis de usar para fotógrafos casuais e entusiastas. Com modelos que variam de simples point-and-shoots a câmeras de zoom avançadas, eles oferecem conveniência, qualidade de imagem sólida e recursos como estabilização de imagem e vídeo 4K.
Conexão
Resolução (MP)
Resolução
As câmeras Canon Close-Up & Handheld são projetadas para fotografia e vídeo detalhados e próximos. Compactas e fáceis de usar, elas oferecem foco preciso, imagens de alta resolução e recursos macro versáteis, perfeitas para vlogs, fotografia de produtos e close-ups criativos.


