PhotoRobot Cube V5 / V6 / Manual do usuário compacto
Este manual do usuário fornece instruções técnicas sobre a instalação, conexão e uso do PhotoRobot Cube V5 / V6 / Compact. Inclui instruções sobre como instalar o robô Cube como um suporte de torso de manequim giratório. O manual visa apoiar os clientes da PhotoRobot durante a montagem de seu dispositivo, seu primeiro uso e na integração de operadores de linha de produção.

Nota: A primeira instalação de um dispositivo PhotoRobot deve ser sempre realizada por uma autoridade autorizada da PhotoRobot. As autoridades com autorização para instalar o PhotoRobot são um distribuidor aprovado ou um representante do próprio fabricante.
Importante: Sempre consulte primeiro as informações e instruções de segurança do PhotoRobot, além do manual fornecido especificamente com seu dispositivo antes de qualquer autoinstalação ou primeiro uso.
Cube V5 / V6 / Compacto Primeiro Uso & Instalação
Obrigado e parabéns pela compra do PhotoRobot Cube! Seu dispositivo representa décadas de experiência profissional, know-how e inovação em fotografia automatizada. O design de cada robô está pensando em você. Enquanto isso, o software está em constante desenvolvimento – adaptando-se às necessidades exclusivas e beneficiando todo o ecossistema PhotoRobot a cada atualização.
Bem-vindo ao PhotoRobot. Use esta documentação técnica sobre o Cube V5 / V6 / Compact PhotoRobots para se familiarizar com a tecnologia e para obter instruções detalhando a montagem e o primeiro uso da solução.
1. Descrição do produto - Cubo V5 / V6 / Estojo compacto
Os dispositivos PhotoRobot Cube V5 / V6 / Compact são um dos robôs de estúdio fotográfico mais versáteis. Cada cubo pode funcionar de forma autônoma ou em combinação com outros PhotoRobots e possui configurações para 3 modos diferentes de operação. O Cubo funciona como uma plataforma de fotografia rotativa, no modo de suspensão de objetos, e como um suporte de torso de manequim rotativo.

Os principais recursos do PhotoRobot Cube incluem:
- Uso autônomo ou em combinação com PhotoRobot compatíveis
- Configuração rápida como um toca-discos 360 ou no modo de suspensão de objetos
- Suporte para um suporte de torso de manequim ou plataforma giratória
- Compatível com manequins fotográficos de diferentes tipos e tamanhos
- Disponível nas versões Cube V5, V6 e Compact para maior versatilidade
1.1. Visão geral do dispositivo - Cube V5 / V6 / Compact
O Cube V5, Cube V6 e Cube Compact da PhotoRobot estão operacionais em três configurações diferentes. As configurações padrão envolvem o uso do dispositivo como uma plataforma de fotografia rotativa ou para suspender objetos no ar para fotos. Alternativamente, é possível configurar o dispositivo como um suporte giratório para montar um torso de manequim.
a) Configuração da Foto 360 / Plataforma Rotativa:

b) 360 / Modo de Suspensão Rotativa:

c) Suporte de torso de manequim rotativo:

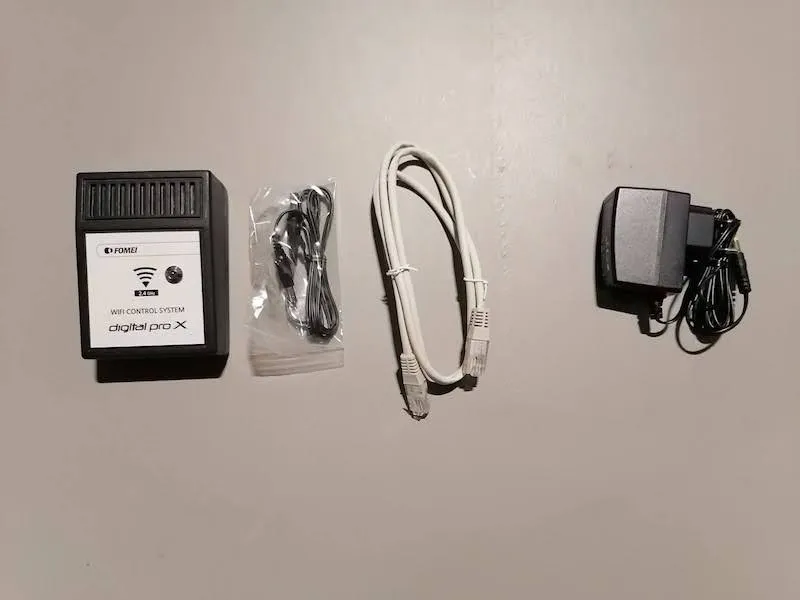
Nota: A unidade de controle do Cube V5 e do Cube V6 é um componente separado, mas integral dos dispositivos. O Cube Compact possui uma unidade de controle integrada dentro da máquina.
- A imagem acima mostra a unidade de controle do Cube V5 / Cube V6.
1.2. Parâmetros técnicos do Cube Compact
Existem os seguintes parâmetros técnicos para o Cube Compact.
- Peso: 26,21 kg
- Dimensões: 337,5 x 373,5 x 209,5 mm
- Fonte de alimentação: 100 - 230 V, 50 HZ, fusível T1.6 A (230 V), T3.15 A (115 V)
- Capacidade de carga: 130 kg para montagem inferior e superior
- Torque do eixo de saída: 143,5 Nm
- Velocidade: 0 -17 1.min-1
1.3. Acessórios Cubo Compacto
O Cube Compact possui as seguintes peças e acessórios.
a) Cabide:

b) Base inferior:

c) Base superior:
d) Pés da máquina:

e) Placa:

f) Portal:

1.4. Visão geral da instalação e uso do Cube Compact
Além dos acessórios Cube Compact, existem várias configurações para instalação e uso do Cube Compact. Estes incluem as seguintes peças de configuração e configurações.
a) Placa de fixação inferior (para fixação da mesa giratória do dispositivo ou sistema de montagem):
b) Plataforma rotativa autônoma fixada (fixada ao chão para maior estabilidade):


Nota: Nesta configuração, há uma placa de 95 cm com uma base de montagem em uma superfície de piso estável. Isso estabiliza a máquina quando em uso, funcionando para evitar tombamento. Seus casos de uso incluem a apresentação de objetos de pequeno e médio porte, até o tamanho máximo de 60 - 65 cm.
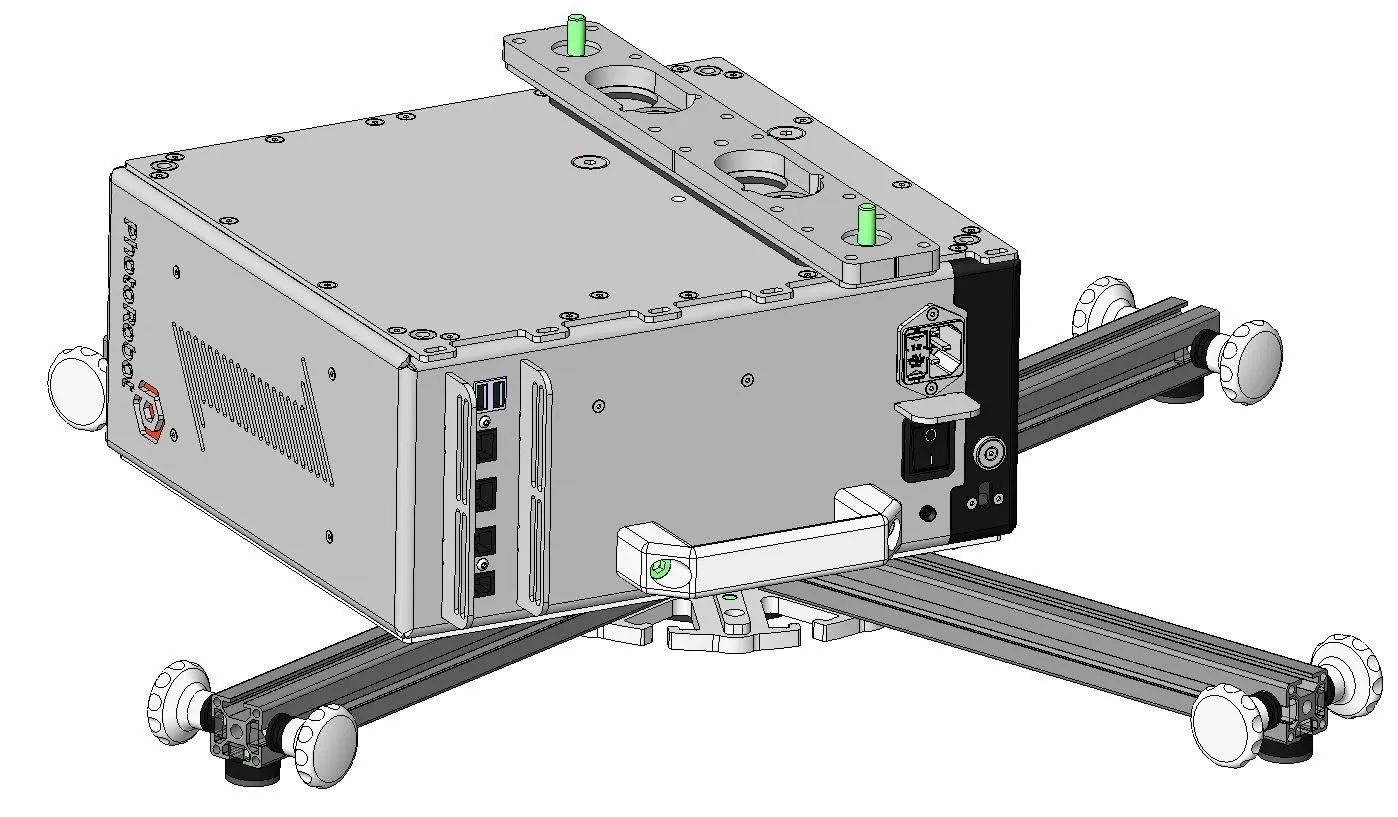
c) Plataforma rotativa independente (com pés de dispositivo em uso):
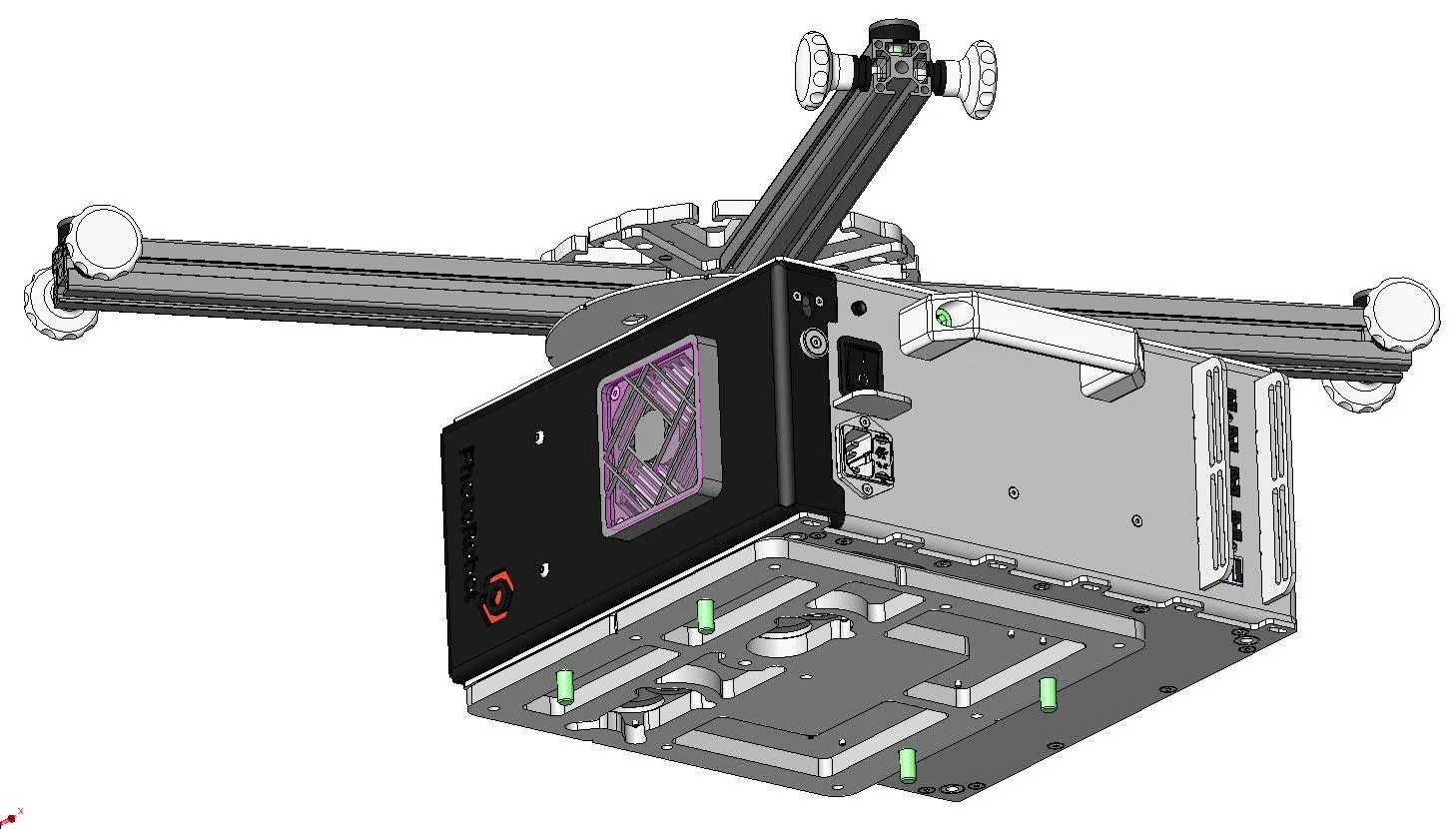
d) Modo de suspensão rotativa 360 (montagem de cabeça para baixo em um portal superior):




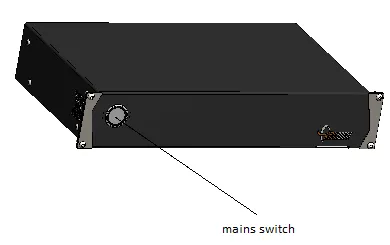
1.5. Parada de emergência compacta cubo
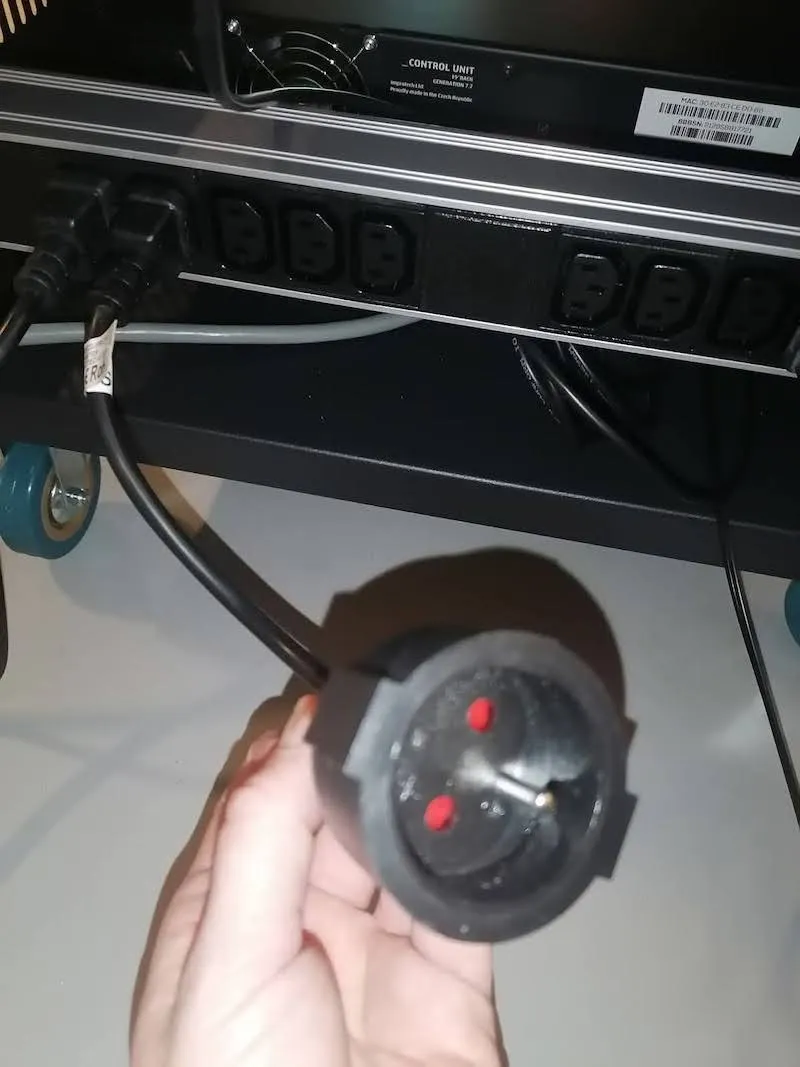
Para realizar uma parada de emergência, desconecte o dispositivo da rede elétrica puxando o cabo de alimentação da tomada.
1.6. Manutenção do Cube V5 / V6 / Compact
Observe que é necessário manter o dispositivo limpo e em um ambiente seco, climatizado e com temperatura constante. Remova a poeira apenas com um pano úmido e não use produtos químicos ou solventes para qualquer limpeza.
Por design, o equipamento deve estar sujeito a inspeções e revisões regulares de acordo com a legislação local. Após o término de seu ciclo de vida, o equipamento elétrico deve ser descartado adequadamente por meio da entrega ao sistema de coleta de lixo eletrônico ditado pela legislação local.
2. Primeiro uso - PhotoRobot Cube V5 / V6 / Compacto
Antes do primeiro uso do PhotoRobot, é necessário entender o conceito por trás da tecnologia. PhotoRobot é uma solução revolucionária tudo-em-um para a automação de fotografia de produtos e objetos. Do ponto de vista técnico, é uma unidade modular composta por hardware e software. Portanto, é necessário que o próprio PhotoRobot esteja conectado na mesma rede que o computador que o opera. A rede também deve ter uma conexão com a Internet para acessar os serviços PhotoRobot, que são executados na nuvem. Existem então os seguintes requisitos que devem ser sempre atendidos.
- Deve haver uma unidade de controle PhotoRobot conectada à rede local.
- Um computador é necessário para executar a GUI de serviço ou o software do operador chamado _Controls.
- O computador deve estar conectado à mesma rede que a unidade de controle PhotoRobot.
- A rede deve estar conectada à Internet.
Depois de garantir a conexão do PhotoRobot ao computador e à rede local, verifique os parâmetros do sistema de distribuição de eletricidade (por exemplo, voltage e frequência).
Em seguida, verifique a configuração de energia da unidade de controle. Deve cumprir todos os parâmetros do sistema de distribuição de eletricidade. Se a configuração da unidade de controle não estiver em conformidade, consulte a próxima seção sobre Configuração de energia da unidade de controle.
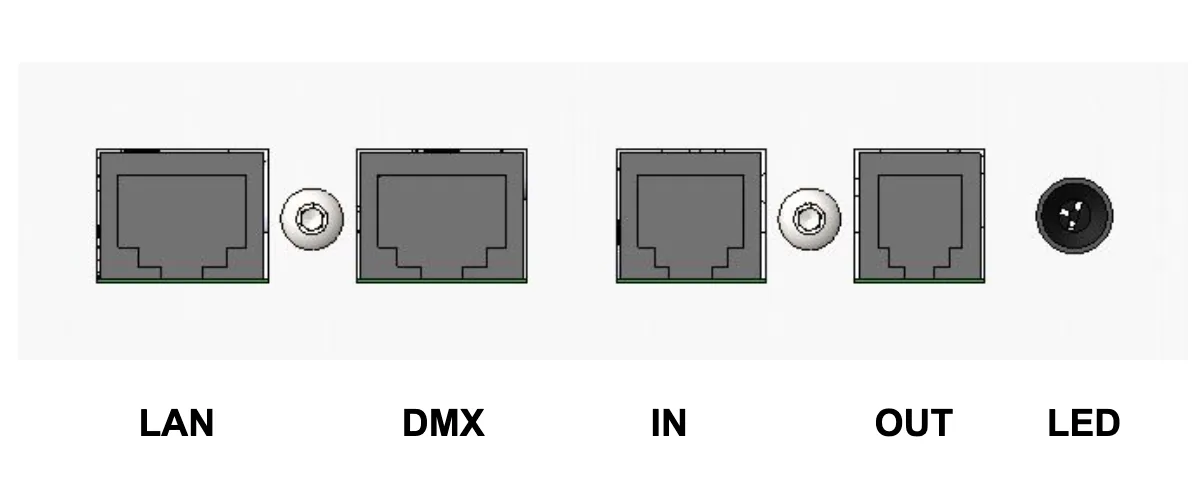
Se compatível, prossiga conectando a Unidade de Controle à rede por meio de um cabo Ethernet.
Nota: Para os modelos Cube V5 / V6, a Unidade de Controle é um dispositivo separado. Encontre o conector RJ45 na parte traseira da unidade de controle. O Cube Compact possui a Unidade de Controle integrada à máquina. Encontre o conector RJ45 na parte traseira do robô Cube.
2.1. Configuração de energia da unidade de controle
Para verificar a configuração de energia da unidade de controle, o modelo mais antigo da unidade de controle possui um vol manualtage seletor na parte traseira do dispositivo.

Alternativamente, o modelo mais recente da Unidade de Controle não possui seletor de tensão e possui uma faixa funcional de operação de 110 V a 240 V.
Se não tiver certeza sobre a configuração de energia da unidade de controle, entre em contato com o suporte técnico da PhotoRobot para obter assistência de um técnico especializado da PhotoRobot.
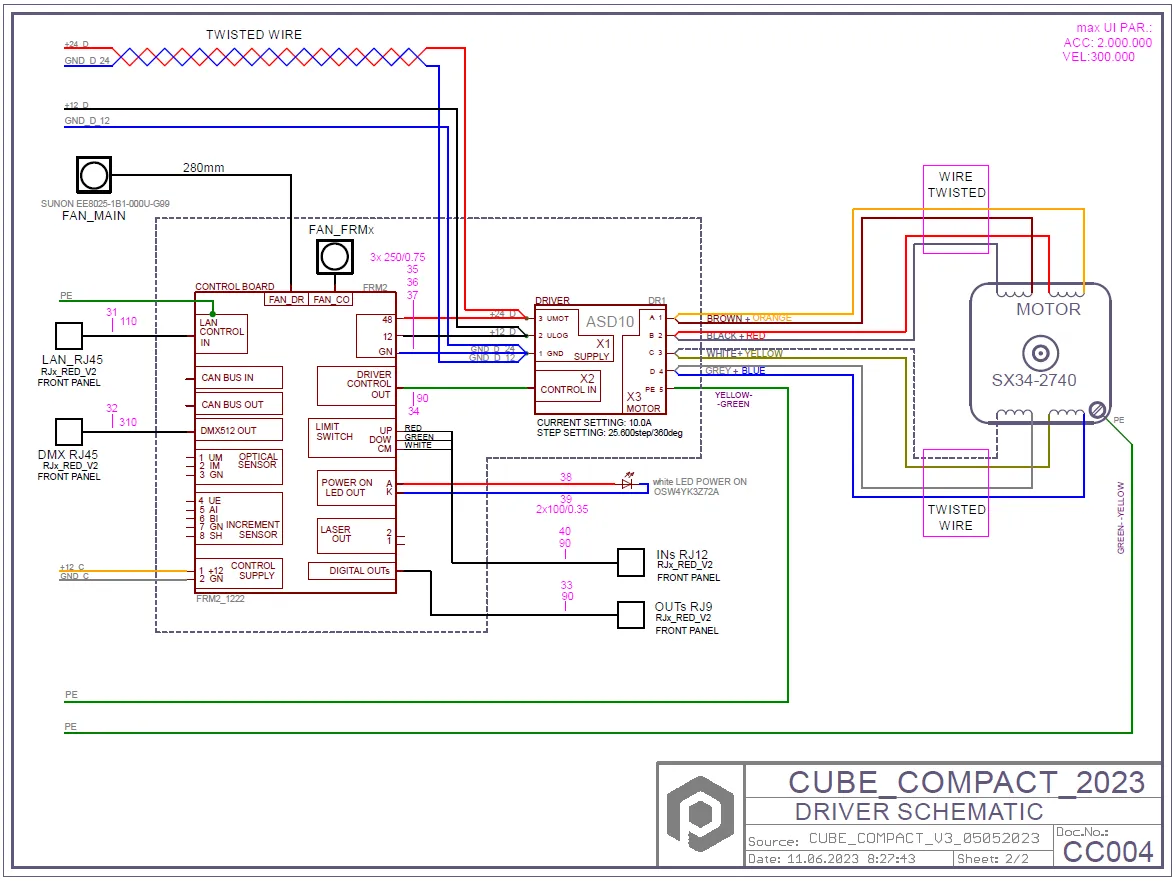
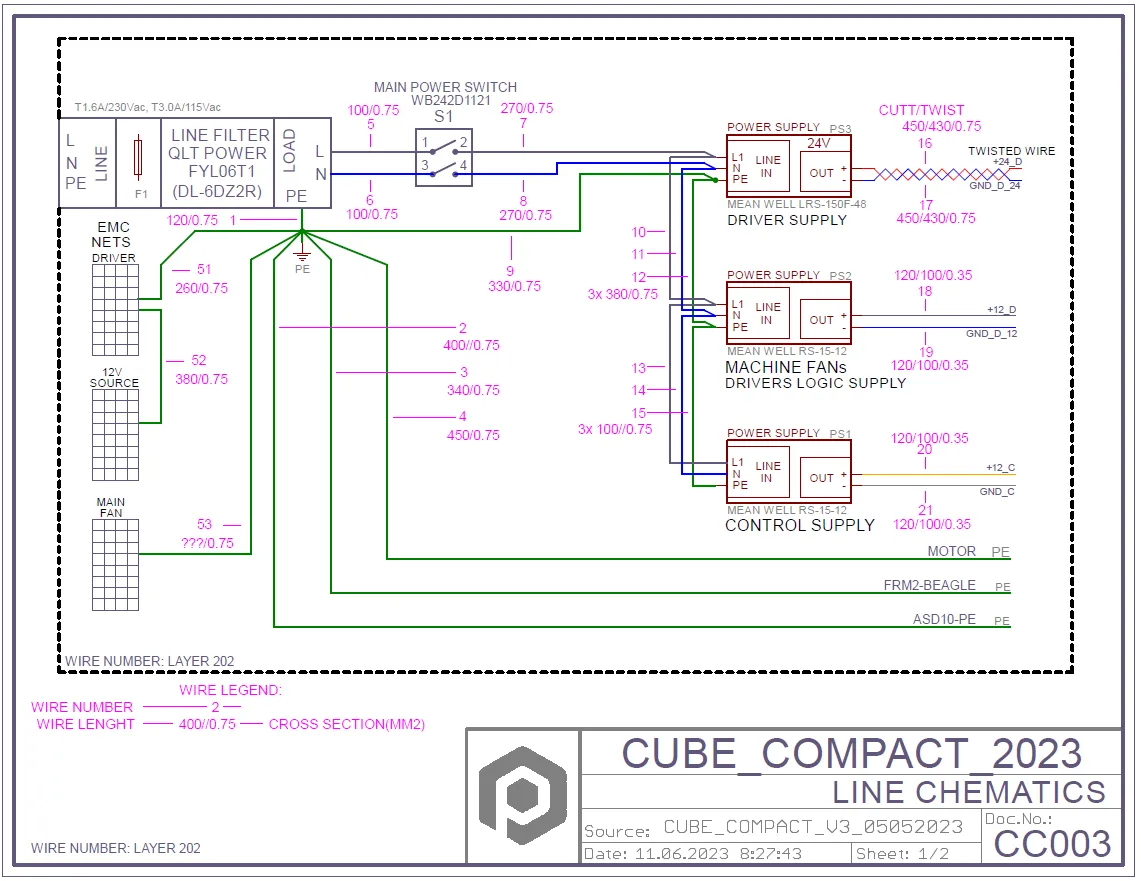
2.2. Diagrama Elétrico Compacto do Cubo
2.3. Configuração de rede
Para configurar a rede para se comunicar adequadamente com o PhotoRobot, os seguintes requisitos devem ser atendidos na rede.
- Um servidor DHCP na rede é obrigatório.
- A comunicação das portas TCP 7777, 7778 deve ser permitida.
- Transmissões UDP na porta 6666 devem ser permitidas
- A conexão com a Internet é obrigatória.
- *. photorobot.com acesso deve ser permitido.
- as-unirobot.azurewebsites.net acesso deve ser permitido.
- Recomenda-se a conexão com fio do PhotoRobot à LAN.
- Consulte Pré-requisitos de rede detalhados do PhotoRobot para obter mais informações, se necessário.
- Conecte o plugue de alimentação à tomada.
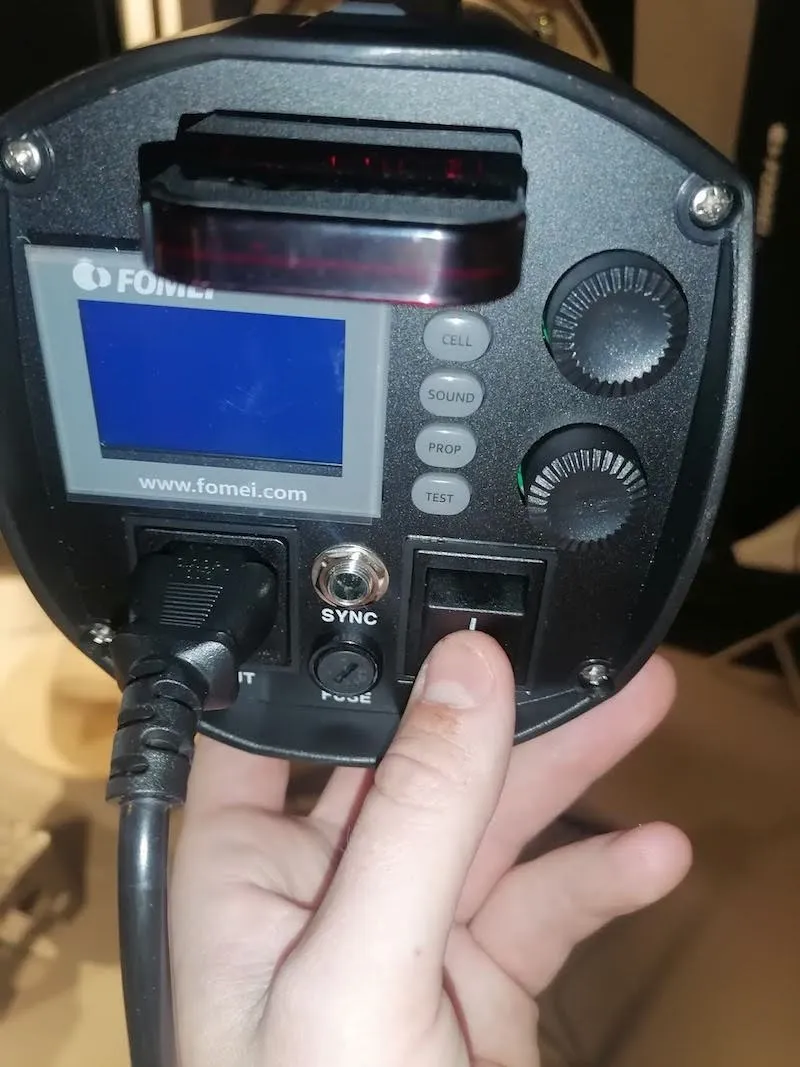
Em seguida, pressione o interruptor de rede na Unidade de Controle do Cube V5 / V6 (ou na parte traseira do Cube Compact). A luz de status mudará de piscando para luz contínua para sinalizar quando estiver pronta para operação.
2.4. Encontre o endereço IP do PhotoRobot na LAN
Após a configuração adequada da rede, é necessário procurar e identificar o endereço IP do PhotoRobot na LAN. Para isso, o aplicativo PhotoRobot Locator é integrado diretamente ao CAPP para facilitar a busca e identificação de Unidades de Controle na rede. Certifique-se de estar usando a versão mais atualizada do CAPP para acessar este recurso.
Em seguida, para identificar um robô na rede diretamente no CAPP, abra a versão local do CAPP, vá para Configurações e clique em Robots / Control units.

O menu Robôs / Unidades de controlo exibe colunas com Nome, Rede, Unidade, Versão, Descoberto e Identificar para cada robô. Se o ponto à esquerda do nome do robô for verde, ele está online. Clicar no campo do robô abrirá então a interface do site do robô. Isso também fará com que a luz LED na Unidade de Controlo do robô pisque verde para sua identificação mais fácil.
Se o download externo do aplicativo for exigido pelo cliente, o PhotoRobot Locator também está disponível para download no iOS em Downloads da Conta PhotoRobot.

Nota: A versão Android do PhotoRobot Locator foi descontinuada.
Alternativamente, existe o utilitário de linha de comando FRFind para MacOS ou Windows para pesquisar a rede e identificar as Unidades de Controle PhotoRobot. Encontre links para baixar o FRfind também na página de Downloads da Conta PhotoRobot.
2.5. Teste Básico - Cube V5 / V6 / Compact
Para testar o Cube V5 / V6 / Compact, em seguida, abra um navegador da Web e digite o endereço IP associado ao seu PhotoRobot no formato URL. Por exemplo, digite: https://11.22.33.44 (embora observe que esse endereço é apenas um exemplo). Se for bem-sucedido, uma interface de usuário básica será iniciada.

- Ligue os motores (seta 1 acima) e tente operar qualquer parte móvel do robô (seta 2 acima). Se o robô se mover com base em suas instruções, você estará pronto para usar seu dispositivo PhotoRobot regularmente.
3. Conjunto Cube V5 / V6 e suporte de torso de manequim
Ao montar os modelos Cube V5 ou Cube V6, observe que é necessária a montagem da unidade de controle e do rack separados. Este não é o caso do Cube Compact. Se estiver usando o Cube Compact, prossiga para a seção sobre montagem do plano de fundo do papel.
3.1. Montagem do HD Rack e Unidade de Controle (V5 / V6)
3.1.1. Para montar a Unidade de Controle separada do Cube V5 e Cube V6, comece com a montagem do rack. Para isso, siga as instruções do manual anexado à caixa de rack na entrega.

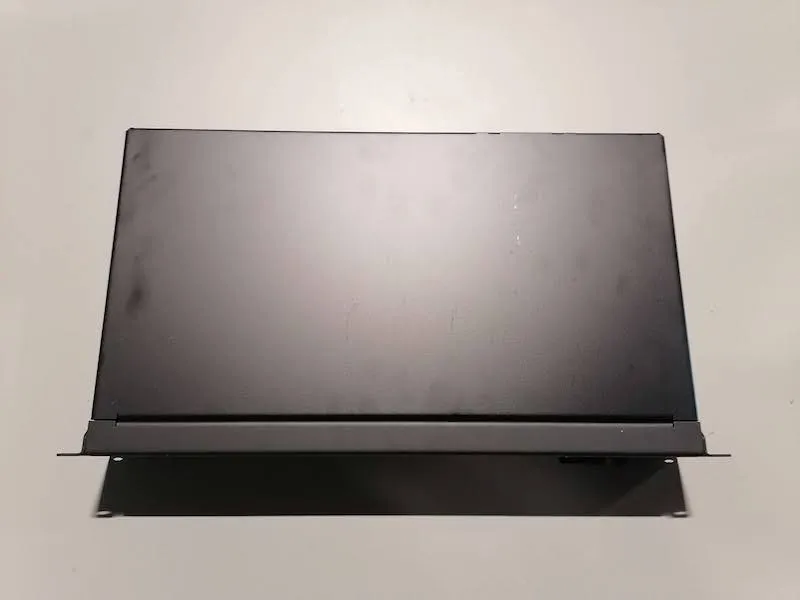
3.1.2. Em seguida, localize e desembale a unidade de controle de sua caixa de transporte de caixa.

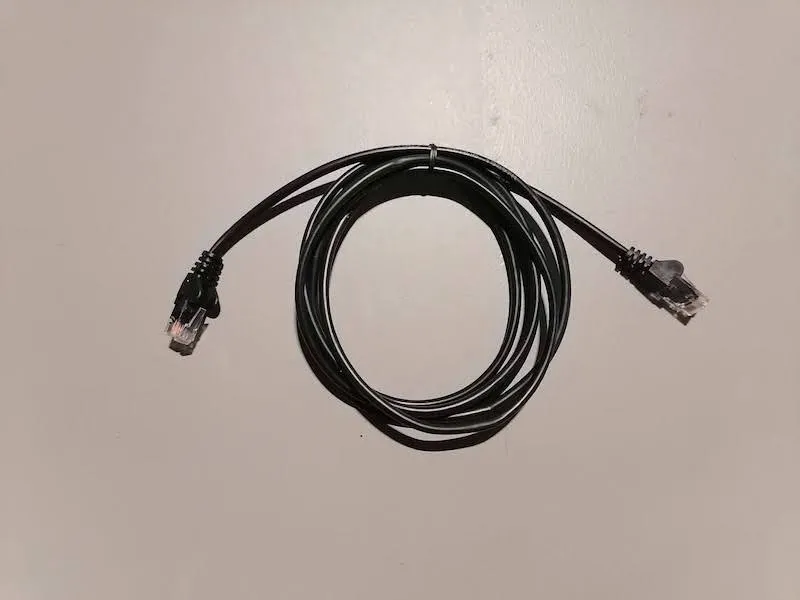
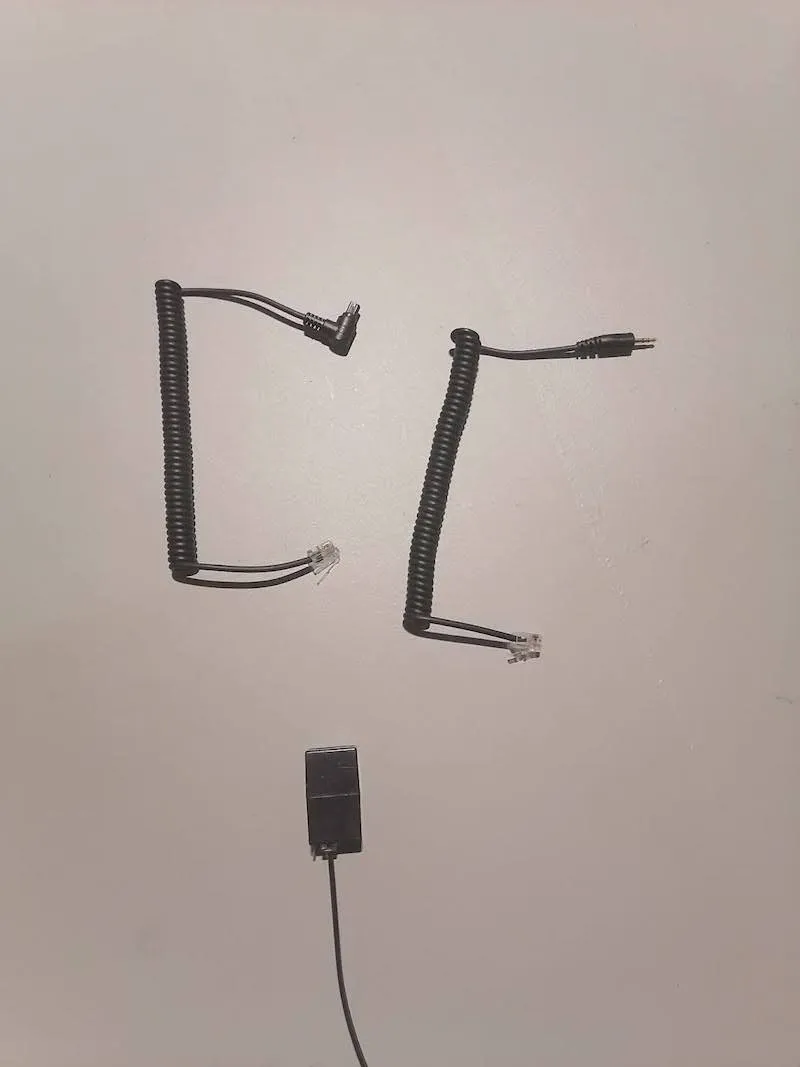
3.1.3. Em seguida, prepare os seguintes cabos: o cabo de alimentação (1 metro de comprimento), o cabo do obturador, o cabo do motor e o cabo ethernet (2 metros de comprimento).
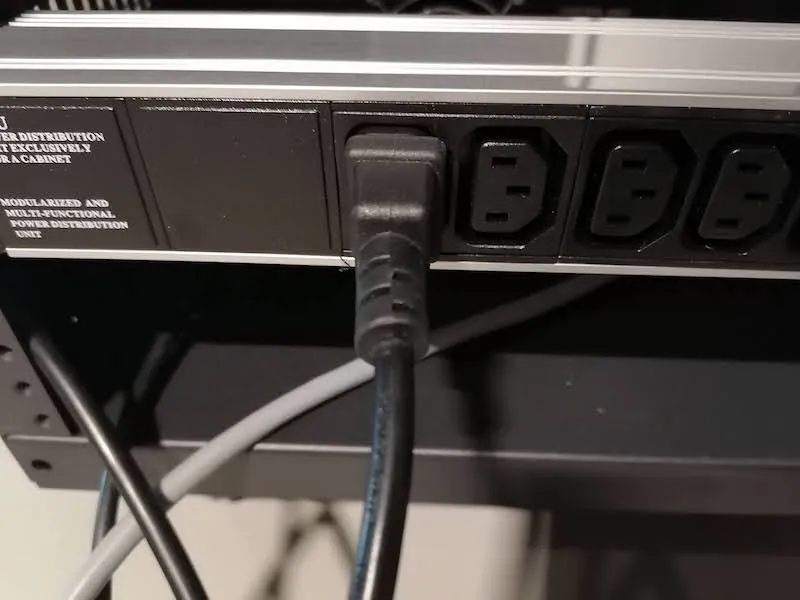
a) Cabo de alimentação (1 metro de comprimento):

b) Cabo do obturador (1 metro de comprimento):

c) Cabo do motor:

d) Cabo Ethernet (2 metros de comprimento):
3.1.4. Coloque cada cabo preparado na etapa anterior no rack.
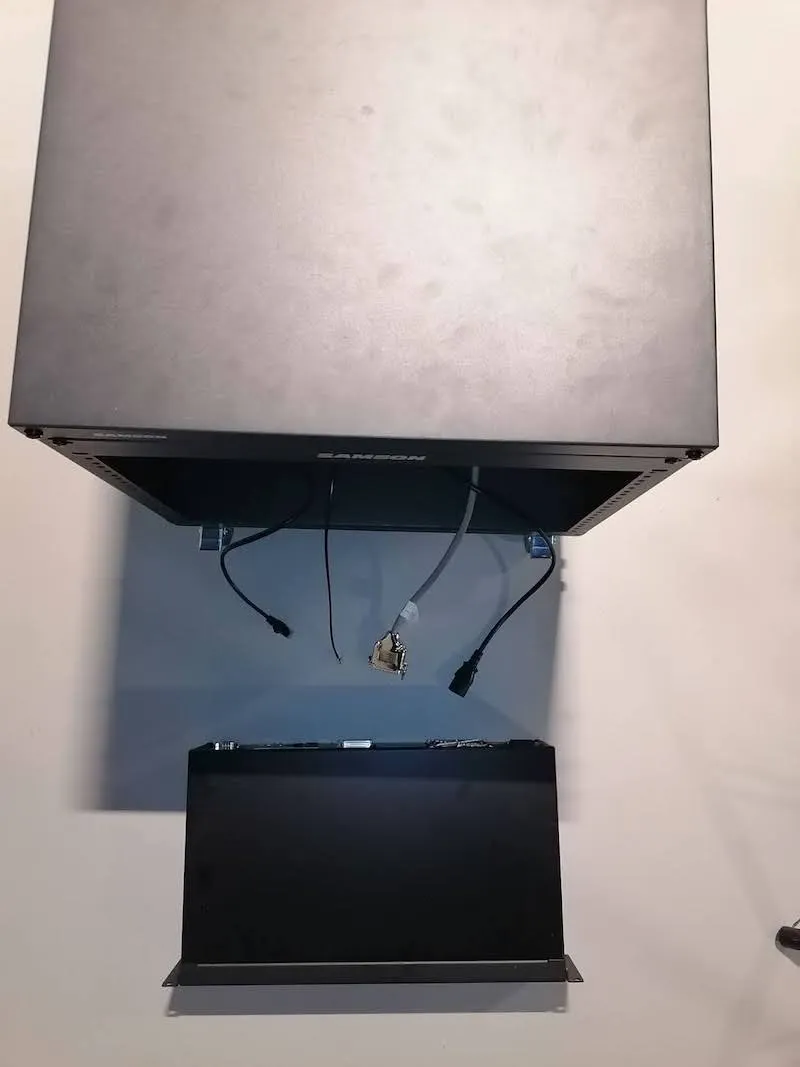
3.1.5. Conecte os cabos das etapas anteriores na Unidade de Controle.

Importante: O cabo do motor deve ser bem apertado usando os dois parafusos no conector. O cabo do obturador se conecta à porta OUT da unidade de controle.
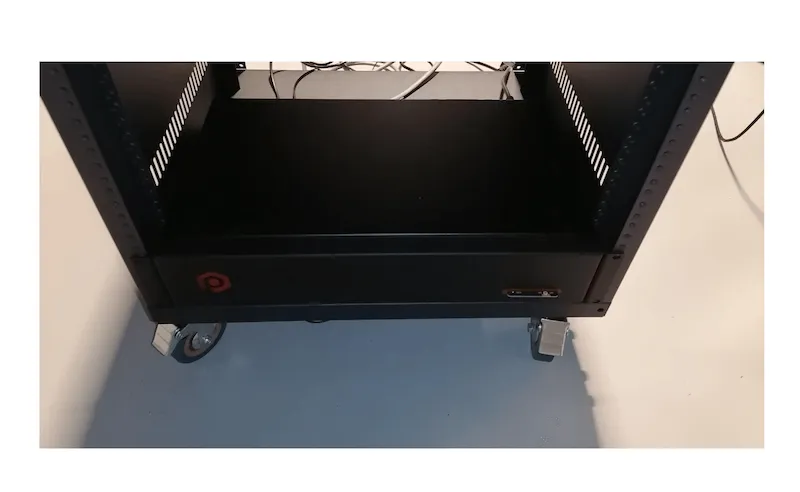
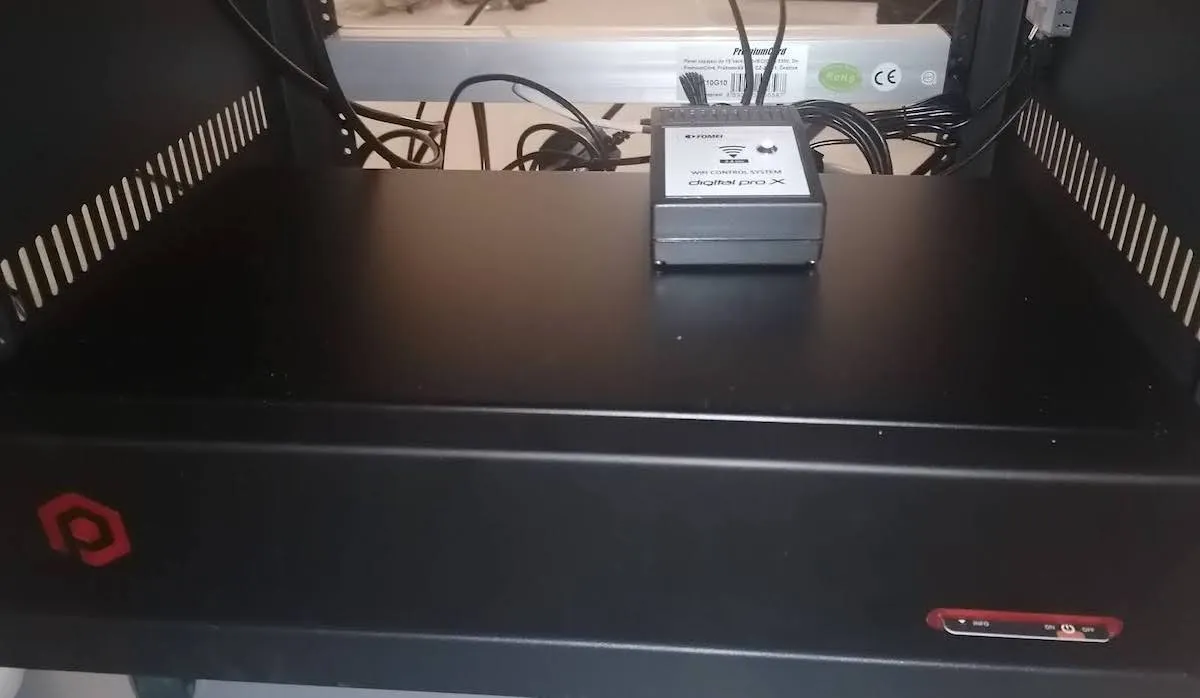
3.1.6. Insira a unidade de controle na caixa do rack e aperte os parafusos para vedá-la.
3.2. Montagem de Acessórios e Conexões
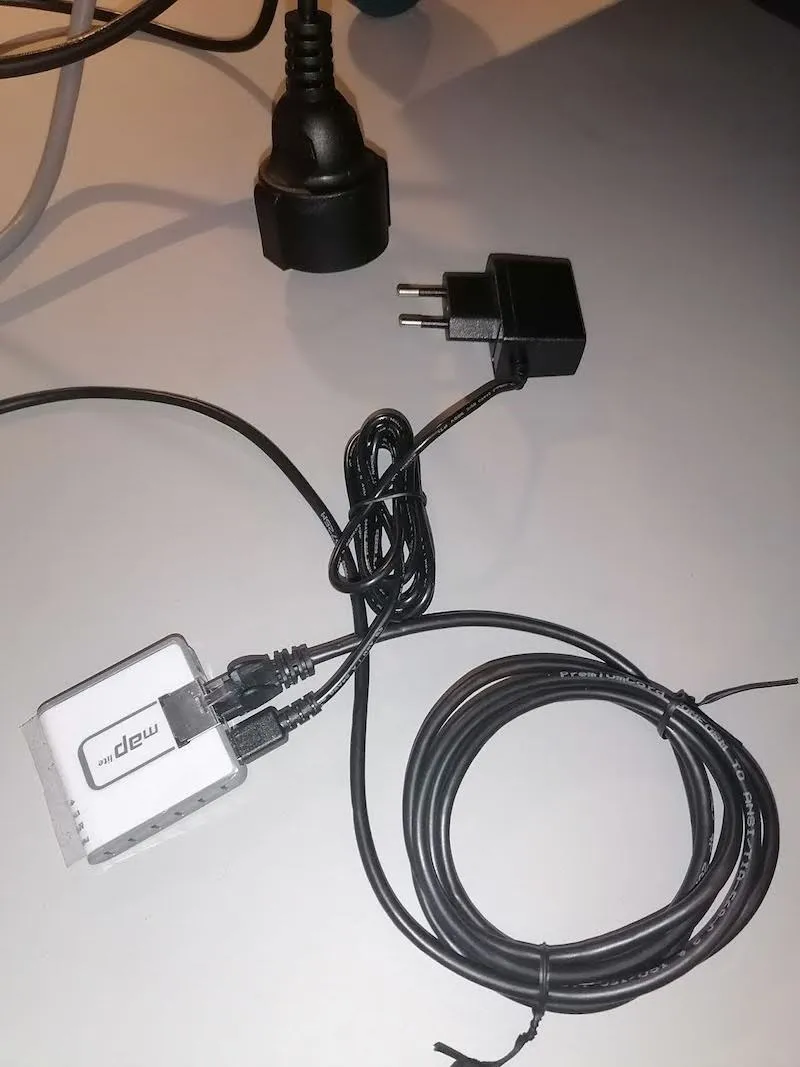
3.2.1. Para conectar todos os acessórios para o Cube V5 / Cube V6, comece desembalando o roteador da caixa de papelão e, em seguida, montando os suportes do rack. Em seguida, conecte os cabos de alimentação ou o adaptador (dependendo do tipo de roteador) e insira o roteador na caixa do rack antes de aparafusá-lo.

3.2.2. Prenda o soquete múltiplo de alimentação na parte inferior na parte traseira do rack, prendendo-o com parafusos.
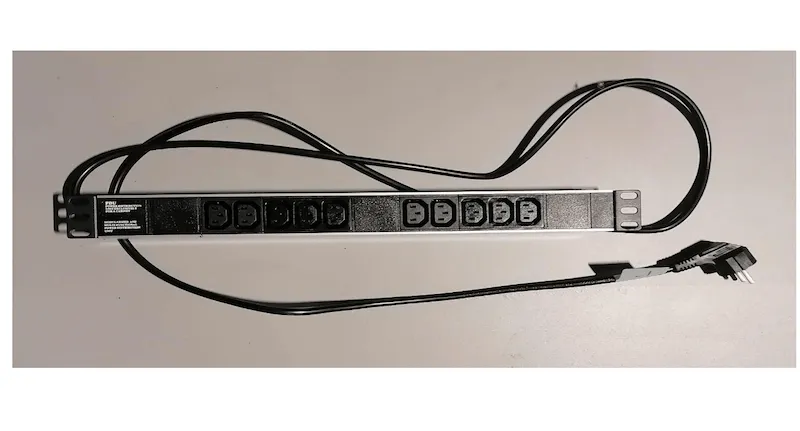

3.2.3. Se o roteador entregue tiver um adaptador de energia, encontre a interface do adaptador de energia e conecte-a a qualquer conector de alimentação com vários soquetes.



3.2.4. Encontre a extremidade livre do cabo de alimentação da unidade de controle e conecte-o ao soquete múltiplo de alimentação.
3.2.5. Usando o cabo ethernet mais longo, conecte o cabo na tomada de dados do seu estúdio. Observe que, por padrão, espera-se que o acesso à Internet esteja disponível por meio dessa tomada de parede de dados e, portanto, o endereço IP será obtido automaticamente.


3.2.6. Conecte a outra extremidade do cabo ethernet na última porta do roteador. Use o número da porta 10 ou o número da porta 13, dependendo do tipo de roteador.
3.2.7. Em seguida, conecte a extremidade livre do cabo ethernet da Unidade de Controle ao roteador usando qualquer número de porta 1-9.
3.2.8. Encontre a interface do adaptador de energia e conecte-a ao soquete múltiplo de energia.
3.2.9. Desembale o módulo Wi-Fi da caixa cartonada e encontre outro cabo ethernet de 2 metros para conectar ao módulo Wi-Fi. A outra extremidade do cabo ethernet se conecta ao roteador usando qualquer número de porta 1-9.



3.2.10. Em seguida, se estiver usando estroboscópios Fomei, desembale o conversor Wi-Fi Fomei e o adaptador de energia e conecte os dispositivos. Se estiver usando luzes Broncolor, consulte PhotoRobot - Gerenciamento de luzes Broncolor.

3.2.11. Conecte a interface do adaptador de energia ao soquete múltiplo de energia e, em seguida, conecte o adaptador. A outra extremidade do cabo se conecta ao roteador usando qualquer número de porta 1-9.

3.2.12. Conecte o plugue de alimentação múltipla na tomada da parede.

3.2.13. Encontre a variante do terminador do cabo do obturador para o modelo da sua câmera e conecte-a ao acoplador do cabo do obturador.


3.3. Montagem do fundo do papel
3.3.1. Para montar o fundo do papel, encontre primeiro dois suportes de luz Master LS 13-B. Em seguida, monte os garfos de fixação W-2 para o conjunto de pinos expansores no topo de cada suporte.



3.3.2. Coloque o fundo do papel com o pino colocado nos garfos de fixação dos dois tripés. Um manterá o lado esquerdo do plano de fundo e o outro manterá o lado direito do plano de fundo.

3.3.3. Em seguida, assista à gravação da tela de Instalação do conjunto de pinos e repita as etapas do vídeo.

3.4. Montagem do robô Cube V5 / V6
3.4.1. Para configurar o robô Cube para suportar o suporte giratório do torso do manequim, comece desembalando o robô e prendendo suas quatro pernas na parte inferior do dispositivo.


3.4.2. Em seguida, conecte a outra extremidade do cabo do motor ao Cubo, apertando os dois parafusos no conector.


3.4.3. Depois de conectar o dispositivo, coloque o robô Cube no chão no centro do fundo branco. Posicione o cubo a 1 metro de distância do papel.
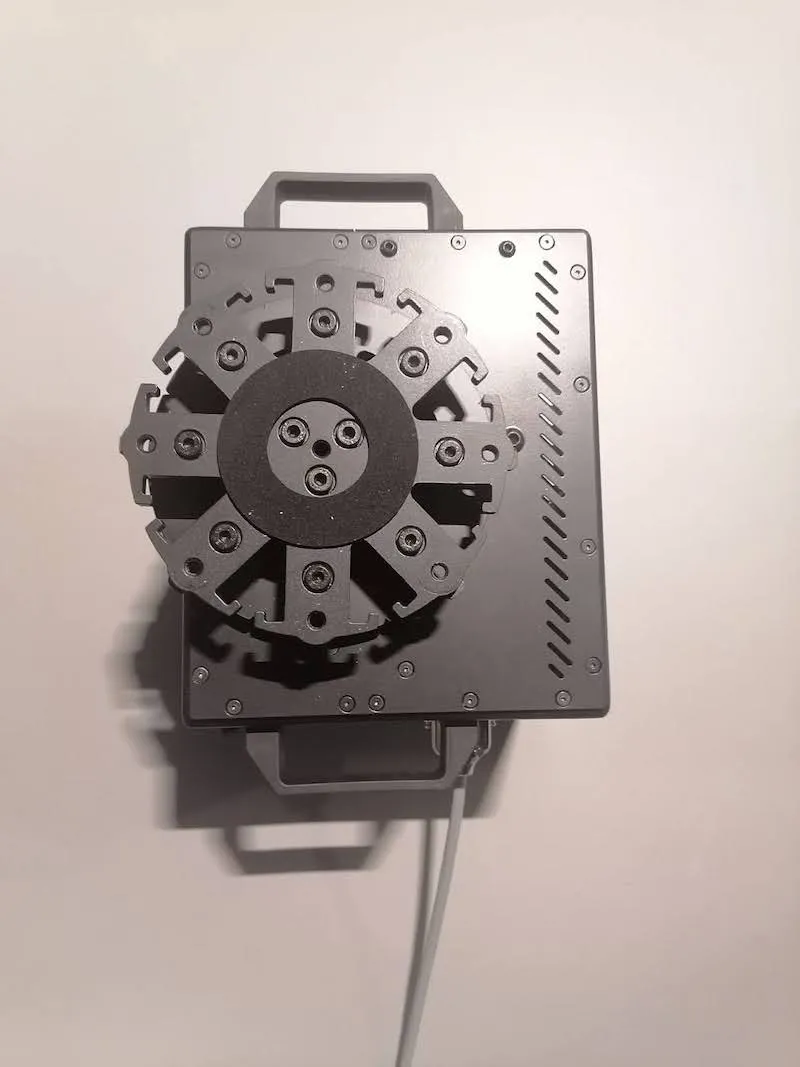

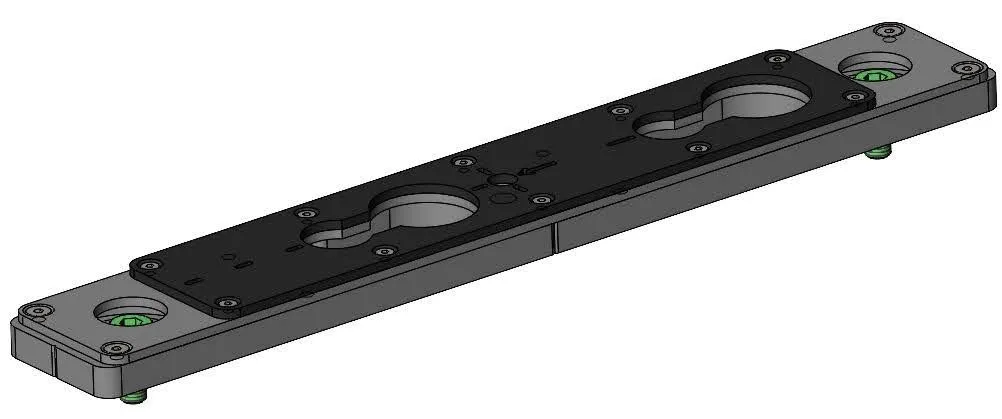
3.4.4. Coloque a placa de redução do suporte do tronco na parte superior do robô Cube e prenda-a no lugar com os quatro parafusos fornecidos.
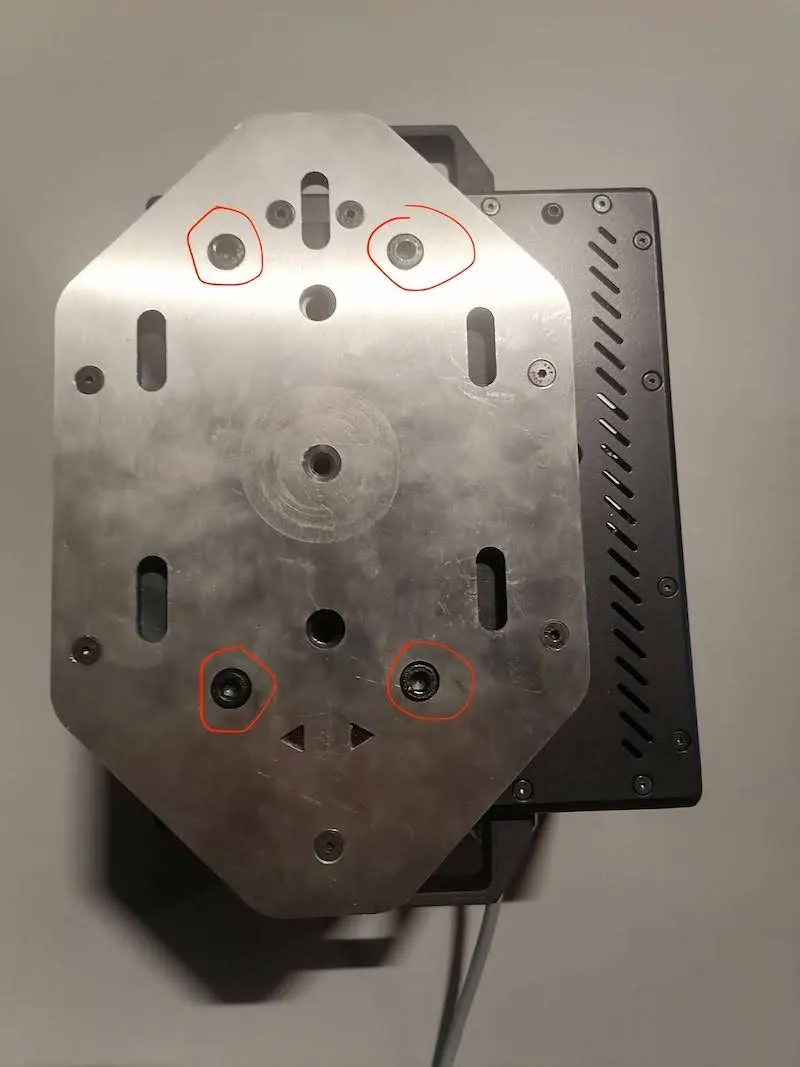
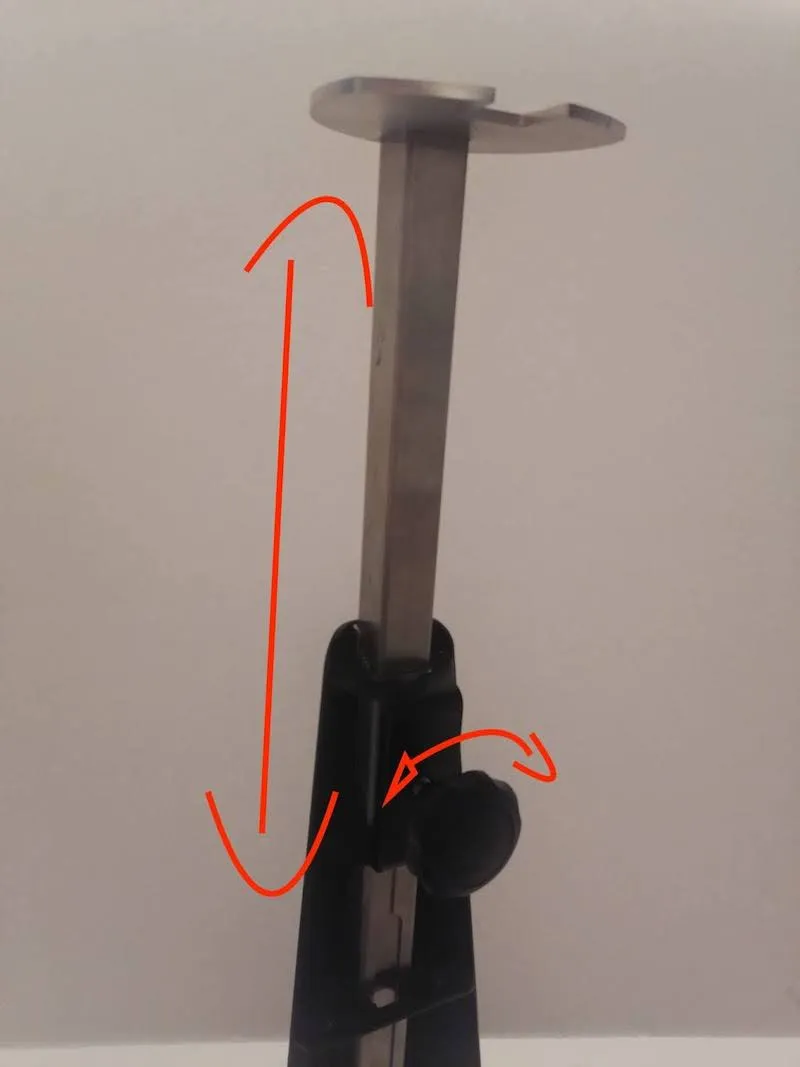
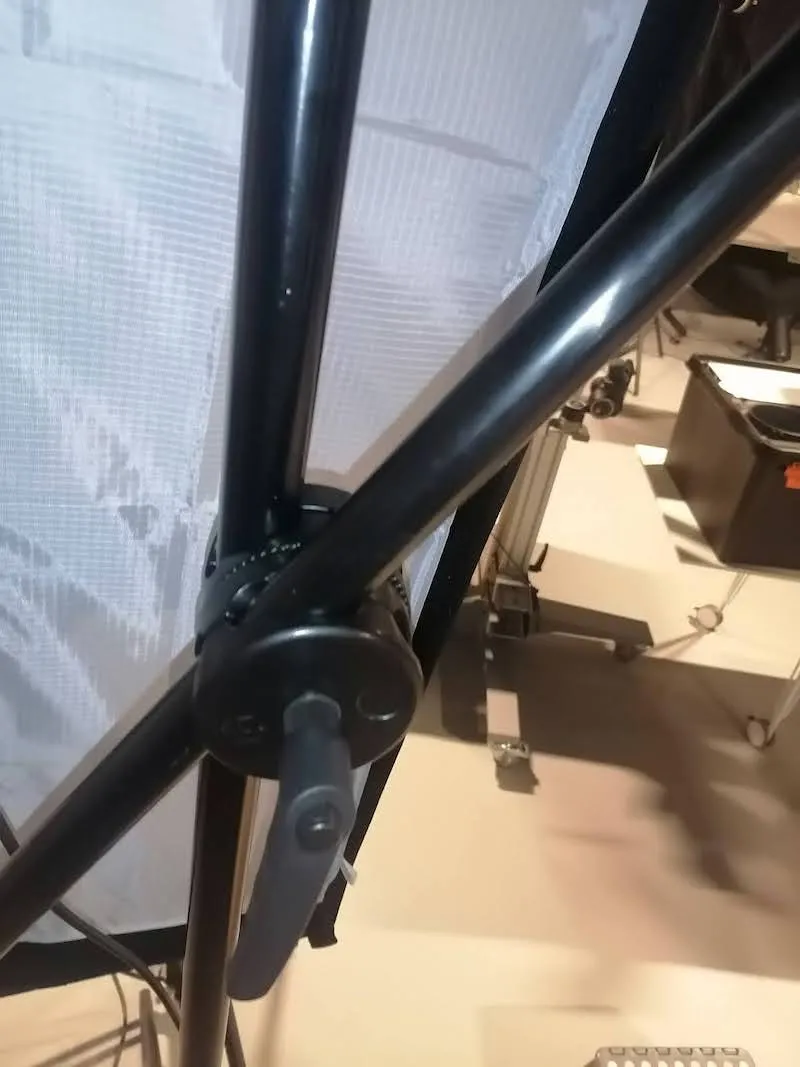
3.4.5. Posicione o corpo do suporte do tronco na placa de redução e prenda o suporte do tronco no lugar usando o parafuso manual grande.


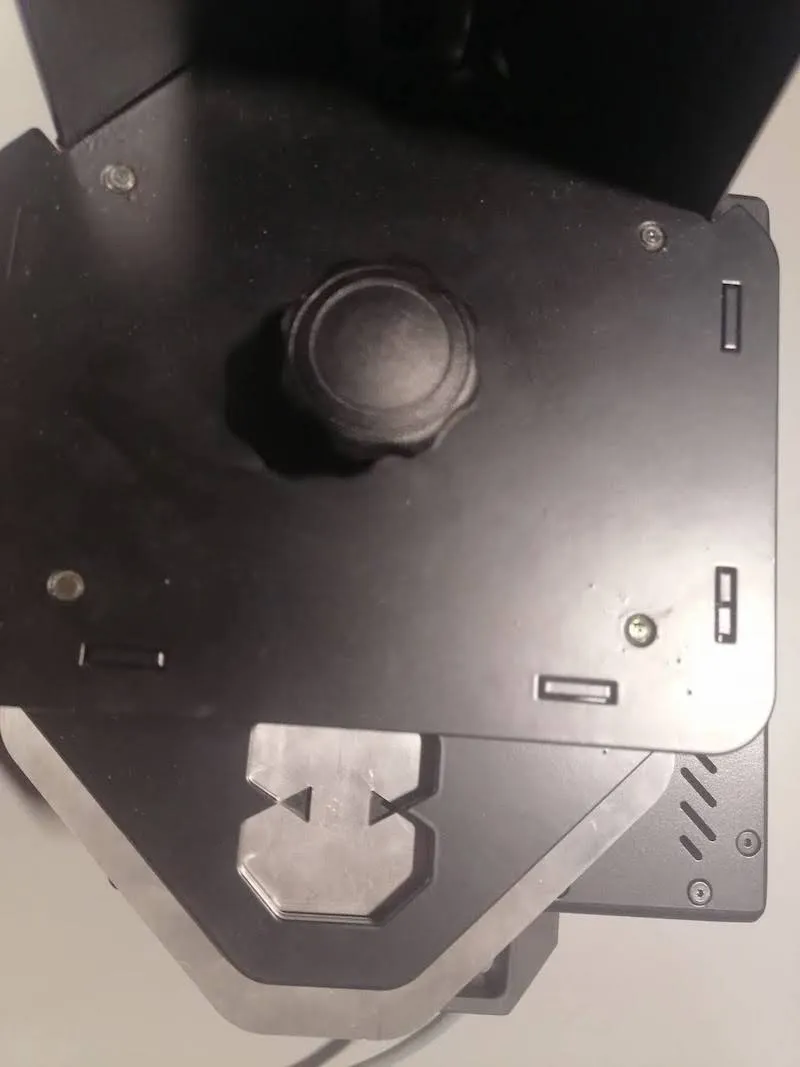
Importante: É necessário prestar muita atenção a esta etapa. Certifique-se de que os símbolos triangulares da placa de redução estejam visíveis através do suporte do tronco. Isso significa que o suporte do tronco foi instalado corretamente.
3.4.6. Neste ponto, observe que a altura do tronco é ajustável afrouxando e apertando o parafuso manual e deslizando a extensão para cima ou para baixo.
3.5. Configuração de luzes de flash
3.5.1. Para configurar as luzes do flash com o robô Cube, primeiro desembale as luzes do flash da caixa e, em seguida, insira a lâmpada piloto em cada luz do flash.


Nota: Para inserir a lâmpada piloto, desparafuse cuidadosamente o vidro da rede principal. Em seguida, faça o mesmo com o protetor de vidro da lâmpada principal, antes de retirar a lâmpada piloto da caixa de papelão. Certifique-se de usar um guardanapo ou pano ao manusear a lâmpada piloto, caso contrário, sua vida útil pode diminuir drasticamente. Em seguida, insira a lâmpada piloto na conexão na posição exata como nas fotos a seguir.




Quando estiver pronto, lembre-se de colocar o protetor de vidro novamente e repita as etapas anteriores para montar cada luz.

3.5.2. Depois de configurar as lâmpadas piloto e substituir seus protetores de vidro, conecte os cabos de alimentação a todas as luzes do flash.


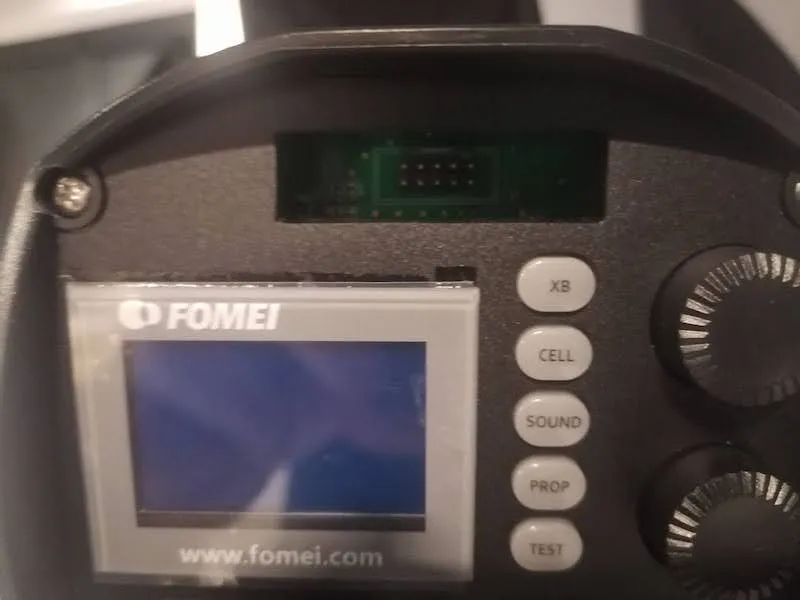
3.5.3. Em seguida, insira os receptores em cada luz e observe as etiquetas FOMEI para orientação.


3.5.4. Conecte as extremidades livres dos cabos de alimentação das luzes ao soquete múltiplo de alimentação.


3.5.5. Ligue a alimentação de todas as luzes do flash.

3.5.6. Posicione as luzes fisicamente ao redor do robô na seguinte configuração de luzes recomendada.
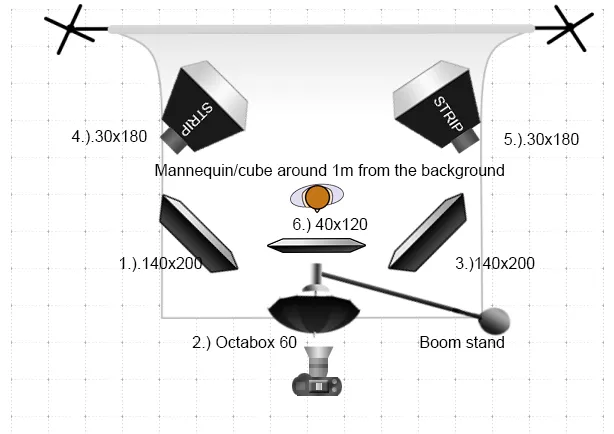
3.5.7. Observe que se um suporte de lança for instalado como na configuração de luzes recomendada, será necessário primeiro construir o suporte de lança. Para construir um suporte de lança, você precisará de um tripé, um poste de lança de parede de 1,5 metros e um conjunto de lança de parede.



Além disso, consulte as imagens a seguir para a construção do suporte da lança.
a) Braçadeira de poste de lança de parede:
b) Peso de equilíbrio na extremidade do poste para apoiar a luz:

c) Imagem ilustrativa de um suporte de lança construído:

4. PhotoRobot _Controls Software
O software PhotoRobot _Controls App fornece controle sobre toda a estação de trabalho robótica Cube V5 / V6 / Compact. Isso inclui controle remoto sobre todos os robôs, câmeras e iluminação. O software gerencia o fluxo de trabalho e fornece a funcionalidade necessária para uma automação eficaz no campo do pós-processamento.
PhotoRobot _Controls software do aplicativo está disponível para download por meio de sua conta PhotoRobot. Não está incluído na entrega da máquina. PhotoRobot _Controls software do aplicativo é adquirido separadamente da máquina.
Além disso, depois de iniciar o aplicativo de software, lembre-se de que a interface pode iniciar automaticamente no "modo assistente". O modo de assistente é uma interface de usuário simplificada. Ele permite, por exemplo, a leitura de códigos de barras para identificar objetos e iniciar as sequências de captura e pós-processamento automaticamente.
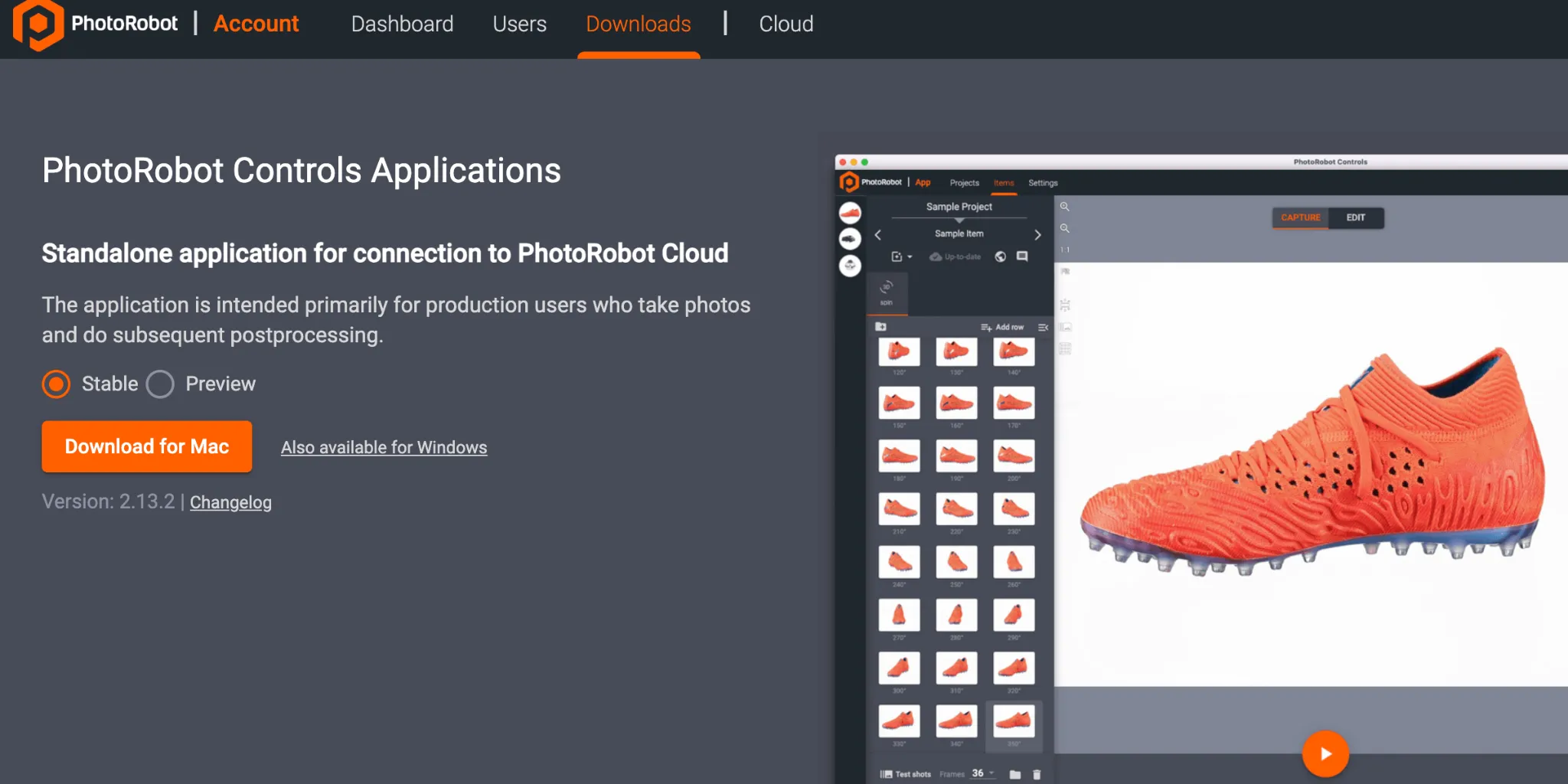
Nota: Tanto a versão estável quanto a versão prévia do CAPP estão disponíveis para download por meio do assistente do instalador. A versão estável contém a versão mais recente do CAPP e recebe versões frequentes. Enquanto isso, a versão prévia do CAPP fornece acesso antecipado aos recursos e correções mais recentes que são transferidos para a versão estável poucos dias após o desenvolvimento. Isso permite que os usuários testem quaisquer problemas que ocorram na versão de visualização antes de entrar em contato com o suporte, pois a maioria dos problemas relatados na versão estável já foram resolvidos na versão de visualização. No entanto, lembre-se de que a versão prévia não é recomendada para uso em produção, na qual a estabilidade é um fator crítico. A versão prévia está em desenvolvimento ativo, que ainda pode incluir recursos incompletos ou bugs não resolvidos.
Importante: As versões mais antigas do CAPP não se destinam à distribuição pública ou do cliente devido ao risco de corrupção do banco de dados. As versões mais antigas do CAPP são acessíveis apenas aos técnicos autorizados da PhotoRobot para desenvolvimento interno ou para casos de uso extremamente especiais. Para encontrar a versão estável mais recente e a versão prévia do CAPP, consulte Versões de download mais recentes do CAPP.
Para obter suporte ou solução de problemas do PhotoRobot _Controls aplicativo, consulte PhotoRobot Introdução.
5. Etiquetas de informação
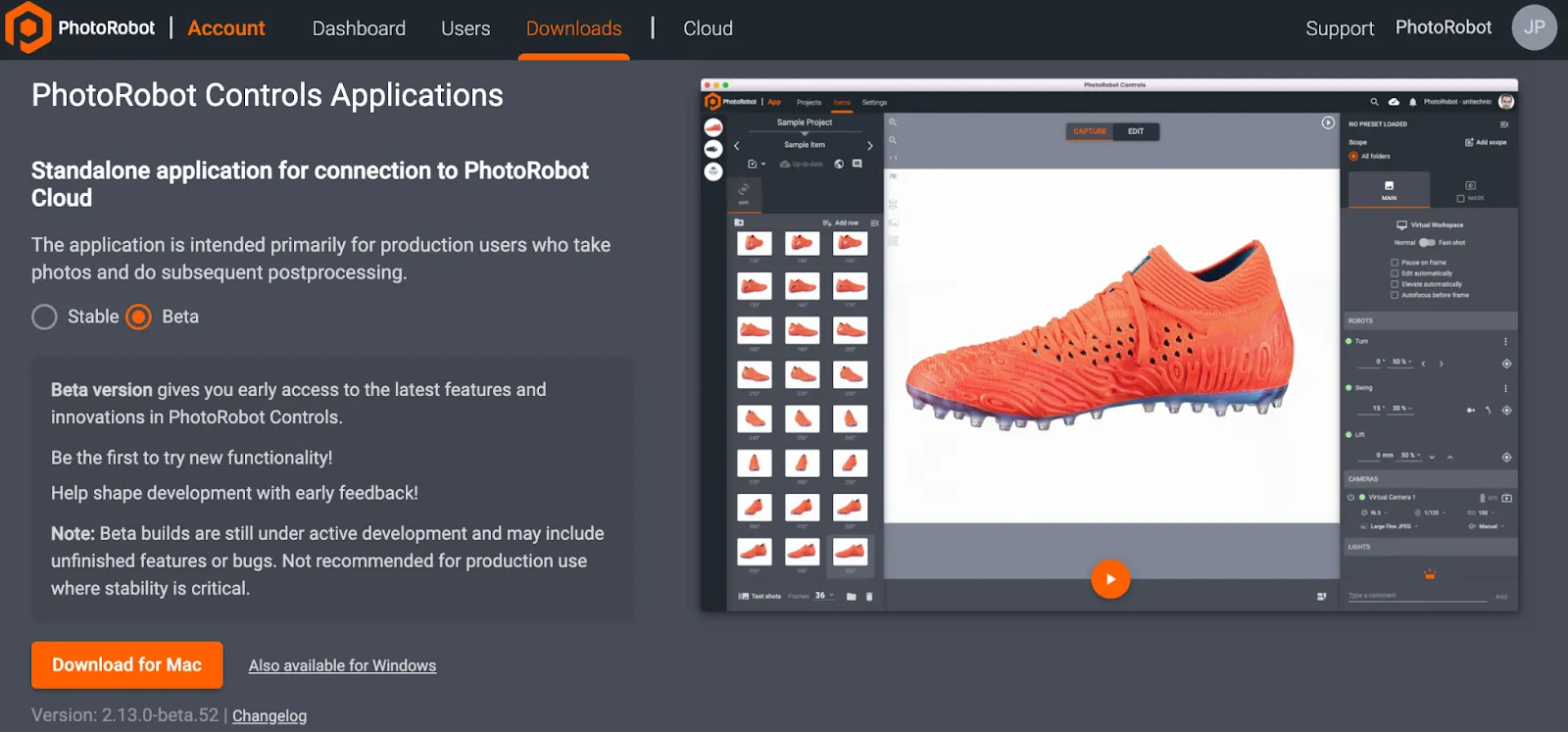
5.1. Visão geral dos símbolos
5.2. Etiquetas compactas em cubo



Série EOS Rebel


Série EOS DSLR


Série EOS M Mirrorless


Série PowerShot


Close-Up / Portátil

A série Canon EOS Rebel oferece câmeras DSLR amigáveis para iniciantes com qualidade de imagem sólida, controles intuitivos e recursos versáteis. Ideais para entusiastas da fotografia, essas câmeras oferecem foco automático confiável, telas sensíveis ao toque de ângulo variável e gravação de vídeo Full HD ou 4K.
Conexão
Resolução (MP)
Resolução
A série Canon EOS DSLR oferece imagens de alta qualidade, foco automático rápido e versatilidade, tornando-a ideal para fotografia e produção de vídeo.
Conexão
Resolução (MP)
Resolução
A série Canon EOS M Mirrorless combina design compacto com desempenho semelhante ao de uma DSLR. Com lentes intercambiáveis, foco automático rápido e sensores de imagem de alta qualidade, essas câmeras são ótimas para viajantes e criadores de conteúdo que buscam portabilidade sem sacrificar a qualidade da imagem.
Conexão
Resolução (MP)
Resolução
A série Canon PowerShot oferece câmeras compactas e fáceis de usar para fotógrafos casuais e entusiastas. Com modelos que variam de simples point-and-shoots a câmeras de zoom avançadas, eles oferecem conveniência, qualidade de imagem sólida e recursos como estabilização de imagem e vídeo 4K.
Conexão
Resolução (MP)
Resolução
As câmeras Canon Close-Up & Handheld são projetadas para fotografia e vídeo detalhados e próximos. Compactas e fáceis de usar, elas oferecem foco preciso, imagens de alta resolução e recursos macro versáteis, perfeitas para vlogs, fotografia de produtos e close-ups criativos.


